Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
L'MX-28AR è un servomotore Dynamixel con funzioni di controllo di alto livello ed eccellente precisione. La versione AR si differenzia dalla versione R per la struttura in alluminio più robusta e per una migliore dissipazione del calore.
I servomotori Dynamixel sono attuatori integrati che comprendono:
I servomotori Dynamixel hanno un identificativo unico e comunicano tramite pacchetti digitali.
Le caratteristiche principali della gamma Dynamixel sono:
Questo video illustra le capacità e le applicazioni esistenti dei servomotori Dynamixel:
I servomotori devono essere collegati a un controller ( CM-700 , CM-5 , CM-510 , CM-530 o OpenCM9.04 ) da controllare. I programmi sono realizzati con RoboPlus, in modo molto semplice e senza richiedere molte conoscenze preliminari.
I controllori più recenti supportano il linguaggio C incorporato ed è disponibile un Kit di Sviluppo Software-SDK per lo sviluppo di applicazioni personalizzate.
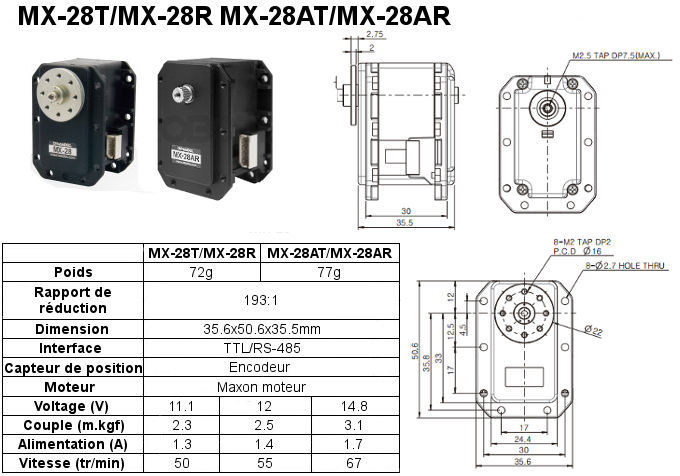
Il modello Dynamixel MX-28 è stato presentato in due nuovi modelli: l'MX-28AT, che mantiene un protocollo di comunicazione seriale asincrono half-duplex e un collegamento fisico TTL Multi Drop, mentre l'MX-28R comunica utilizzando il protocollo RS485 e un bus RS485 Multi Drop.
La serie MX di servomotori Dynamixel vanta nuove caratteristiche come le funzioni avanzate di controllo PID, il controllo della posizione a 360° e la comunicazione ad alta velocità.
Il servomotore MX-28AR Dynamixel è una versione migliorata del modello MX-28R, con i seguenti miglioramenti principali :
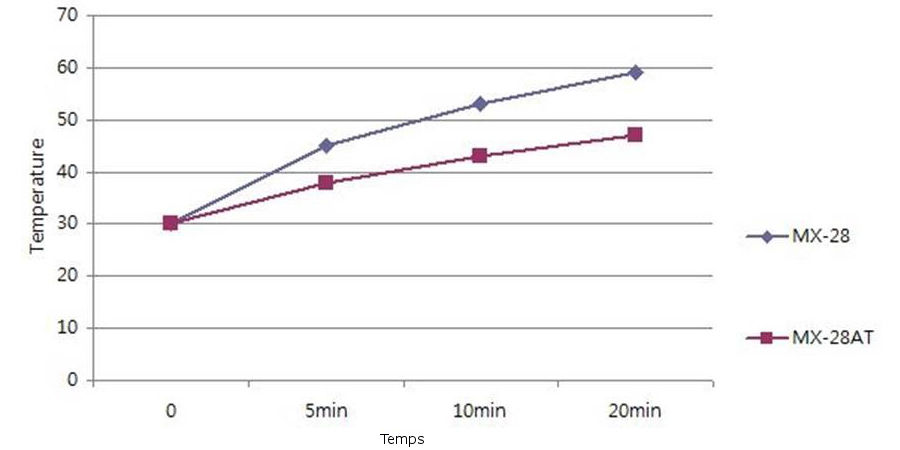
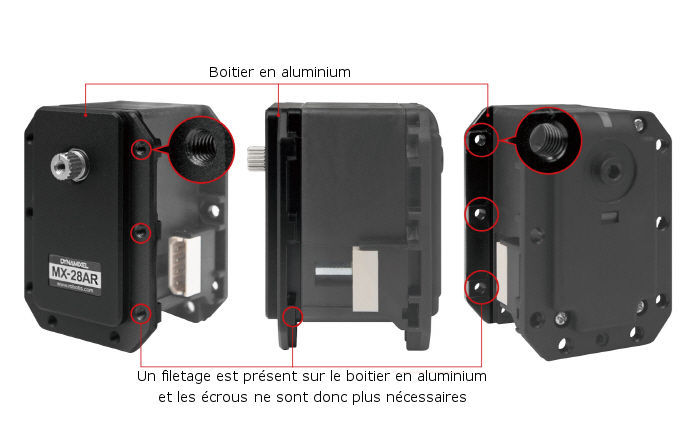
Il modello MX-28AR è realizzato interamente in alluminio e questo nuovo involucro ha una migliore distribuzione del calore, con conseguente riduzione della temperatura rispetto all'MX-28R.
Inoltre, incorpora un nuovo sistema di fissaggio, con una filettatura sull'involucro che elimina la necessità di dadi.
Tutte le specifiche tecniche del servomotore Dynamixel MX-28AR sono disponibili sul sito Web del produttore al seguente indirizzo : http://support.robotis.com/en/product/dynamixel/mx_series/mx-28at_ar.htm
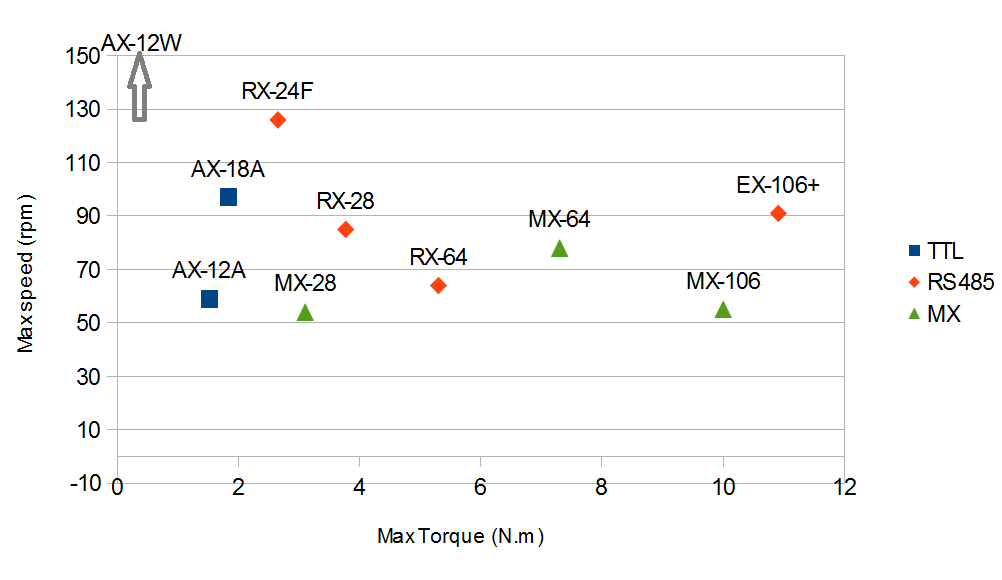
Questo documento consente di confrontare rapidamente le caratteristiche dei diversi servomotori Dynamixel
 Specifiche comparative dei servomotori Dynamixels |
L’immagine seguente mostra le caratteristiche tecniche dei vari servomotori Dynamixel e li pone in relazione tra loro in termini di prestazioni. I servomotori si differenziano in base al tipo di comunicazione (la serie MX offre entrambi i tipi di comunicazione).
Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

L'MX-28AR è un servomotore Dynamixel con funzioni di controllo di alto livello ed eccellente precisione. La versione AR si differenzia dalla versione R per la struttura in alluminio più robusta e per una migliore dissipazione del calore.