Ottenete il vostro preventivo in 3 semplici passi!
1.Aggiungete gli articoli di vostro interesse al carrello
2.Vai al carrello
3.Cliccare su OTTENERE UN PREVENTIVO
Tous vos devis sont accessibles à partir de votre compte client.
Incluso 0,05 € per l'ecotassa
L'MX-64T è un servomotore Dynamixel che si distingue per le sue funzioni di controllo di alto livello e la sua precisione. È più potente dell'MX-28T ma meno dell'MX-106T.
I servomotori MX-64R e MX-64T sono le nuove aggiunte alla gamma MX di Dynamixel. Sostituiscono e migliorano il servomotore RX-64 con un sensore di posizione assoluta senza contatto con precisione a 12 bit (4096 posizioni), controllo della posizione a 360° (in precedenza 251°), controllo continuo della velocità e stima della coppia basata sulla corrente.
Inoltre, il controller è un PID ( proporzionale integrale derivato ), i cui parametri possono essere modificati motore per motore. I valori ammissibili sono compresi tra 0 e 255, quindi i coefficienti PID sono calcolati secondo le formule seguenti.
Anche l'alloggiamento del servomotore RX-64 è stato leggermente modificato, pertanto il servomotore MX-64T non è compatibile con il disco HN05-N101/T101.
Il servomotore Dynamixel MX-64T supporta il protocollo di comunicazione TTL (mentre il servomotore MX-64R utilizza la comunicazione RS485) ad alta velocità (3Mbs), quindi è compatibile con i controller CM-510, CM-530 e CM-700. Si noti che la tensione di funzionamento consigliata non è più la stessa di quella dell'RX-64.
Tutte le specifiche tecniche del servomotore Dynamixel MX-64R sono disponibili sul sito Web del produttore al seguente indirizzo https://emanual.robotis.com/docs/en/dxl/mx/mx-64/
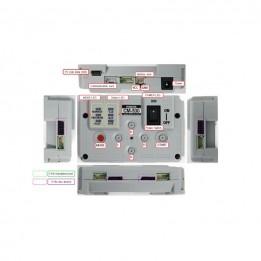
Specifiche comparative dei servomotori Dynamixels
La figura seguente mostra le caratteristiche tecniche dei vari servomotori Dynamixel e li pone in relazione tra loro in termini di prestazioni. I servomotori si differenziano in base al tipo di comunicazione (la serie MX offre entrambi i tipi di comunicazione).

Verifica che il tuo servomotore Dynamixel sia correttamente configurato. Effettua il flash con il software Roboplus e riconfiguralo. Se il problema persiste, contattaci. Per consultare la procedura, puoi informarti tramite questo link.
Probabilmente il motore è montato male. Verifica di aver montato correttamente la barra, rispettando la marcatura (punto e interno della barra).
Il tuo servomotore Dynamixel ha probabilmente un problema meccanico. Puoi contattarci direttamente per vedere cosa possiamo fare.
Verifica la tua alimentazione e il tuo collegamento (con un altro motore, ad esempio). Esegui un reset del tuo servomotore. Se il problema persiste, segui la checklist successiva (in inglese).
Le protocole 1.0 est dédié aux séries Dynamixel AX et MX. Le protocole 2.0 concerne les séries X et Dynamixel Pro. Les tables de contrôle du protocole 2.0 incluent les contrôles PID qui permet un réglage plus précis des mouvements du servomoteur. Le protocole 2.0 peut être mise à jour sur les servomoteurs de la série MX. Vous pouvez vous référer aux pages relatives au protocole 1.0 et au protocole 2.0 pour plus d'informations.

L'MX-64T è un servomotore Dynamixel che si distingue per le sue funzioni di controllo di alto livello e la sua precisione. È più potente dell'MX-28T ma meno dell'MX-106T.