Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
In this construction kit, the small Leo Rover mobile robot bares all, from A to Z. The Leo Rover Developer Kit allows you to assemble the robot’s essential components. With internal Raspberry Pi, powerful controller and ROS-based software you’re ready to begin programming!
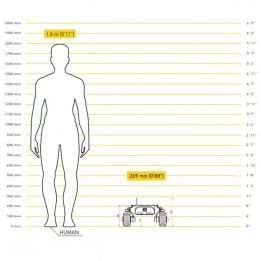
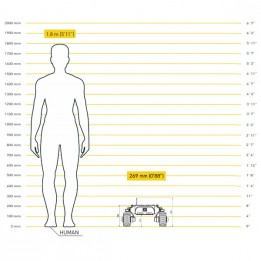
Leo Rover is an ROS-based open-source mobile robotic platform based on the Raspberry Pi 4 that can handle loads of up to 5 kg. In practice, this means you’re free to customise it with all the accessories you can imagine, including grippers or robotic arms, a camera, sensors, IMUs, etc.

The Leo Rover Developer Kit is an opportunity for teachers to offer students a robot in kit form that includes every part needed to assemble using only simple tools.
The kit allows you to rapidly assemble the platform, while providing in-depth information on how the robot operates.
All you need is a few Allen keys and hex-head flat wrenches, a bench vice and a soldering iron.
This is an open-source mobile 4-wheel drive robot in kit form for which you can develop countless add-ons. Anything ranging from 3D printed robotics parts to new robotics apps. There is also a huge community of inventors you can count on to improve your project.

The Leo Rover Developer kit will therefore adapt to any educational project, involving for example remote control, intelligent navigation, monitoring and exploration, mobile weather stations, etc.
Wheels
Battery
Camera
Network
Mobile robot Leo Rover unboxing video
You’ll find everything you need here in open source to learn more about your Leo Rover!

In this construction kit, the small Leo Rover mobile robot bares all, from A to Z. The Leo Rover Developer Kit allows you to assemble the robot’s essential components. With internal Raspberry Pi, powerful controller and ROS-based software you’re ready to begin programming!