- assembled")
 - assembled")
 - assembled")
 - assembled")
 - assembled")
 - assembled")
 - assembled")
Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
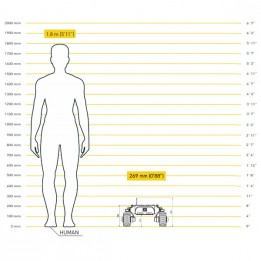
The Leo Rover is a mobile research and educational robot running on a Raspberry Pi 4 that you can customise at will thanks to a wide range of modules!




 - assembled")
The Leo Rover is a mobile research and educational robot running on a Raspberry Pi 4 that you can customise at will thanks to a wide range of modules!