Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Tous vos devis sont accessibles à partir de votre compte client.
Including €0.20 for ecotax
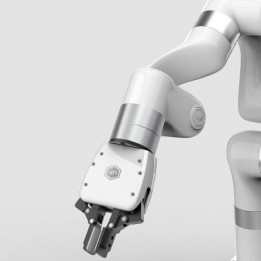
Some robots can have a particularly strong grip... With the Robotis RH-P12-RN hand, your robot now belongs to the club!
The Robotis RH-P12-RN hand will definitely give strength and dexterity to your robot. This 1-DOF (degree of freedom) gripper has passive joints enabling adaptive gripping for various sizes of objects (up to 10 cm in diameter). The maximum gripper spread is 10.9 cm. The RH-P12-RN hand is able to adapt to objects of any form or size, from a large ball to a pen.
This robotic gripper is as strong as it is agile: weighing 500 g only, it can lift loads up to 5 kg without showing signs of weakness with a maximum gripping force of 170N.
The Robotis RH-P12-RN hand stands out for its mechanical capabilities, but it is also very easy to mount onto any compatible Robotis chassis or one of your creations, and you can see all of the parts using a URDF file. The fingertips are detachable and can be easily replaced with customised versions, as you see fit.
The Robotis hand is equipped with an RS-485 multi-drop bus interface using the Dynamixel 2.0 protocol for easy control. The ROS is both Windows and Linux compatible and offers many development options in C++. Torque control and current-based position control are also available. In short, this hand makes it possible to set up almost any robotic manipulation projects!

Some robots can have a particularly strong grip... With the Robotis RH-P12-RN hand, your robot now belongs to the club!