
Was ist die LiDAR-Technologie? Hier folgt der erste aus einer Reihe von 4 Beiträgen über LiDAR, einer Technologie, die sowohl in der Robotertechnik als auch bei selbstfahrenden Kraftfahrzeugen oder archäologischen Ausgrabungen zum Einsatz kommt.
Abrufen der anderen Beiträge in unserer Reihe „LiDAR-Technologie“

Definition — Was ist ein LiDAR?
Ein LiDAR ist ein elektronisches Bauteil, das zur Familie der Sensoren gehört. Genauer gesagt, gehört er zur Kategorie der Flugzeitsensoren (ToF). Ein Sensor erfasst Daten zu einem physikalischen Parameter, wie z. B. Temperatur, Feuchtigkeit, Licht, Gewicht, Abstand usw.
Die Abkürzung LiDAR steht für Light Detection And Ranging . Es handelt sich um eine Berechnungsmethode, mit welcher der Abstand zwischen Sensor und anvisiertem Hindernis ermittelt wird. Ein LiDAR verwendet einen Laserstrahl zur Detektion, Analyse und Überwachung.

Physikalische Vorgänge — Wie funktioniert ein LiDAR?
Die LiDAR-Technologie ist eine Ferndetektionstechnik zur Messung des Abstands zwischen Sensor und Ziel. Das Licht wird vom LiDAR emittiert und auf ein Ziel geleitet. Es wird auf dessen Fläche reflektiert und kehrt wieder zur Quelle zurück. Da die Lichtgeschwindigkeit ein konstanter Wert ist, ist der LiDAR in der Lage, den Abstand zum Ziel zu berechnen.
Abstand = (Lichtgeschwindigkeit x Flugdauer) / 2
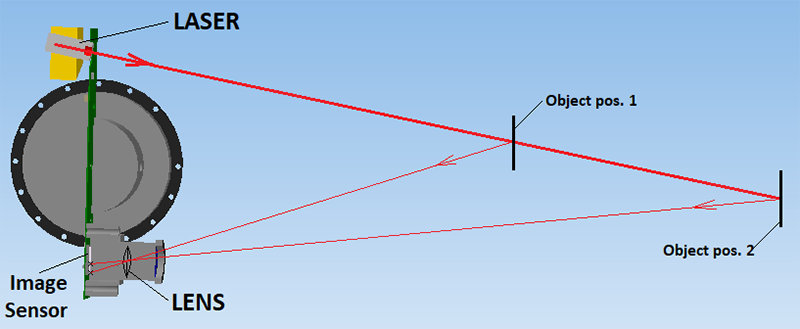
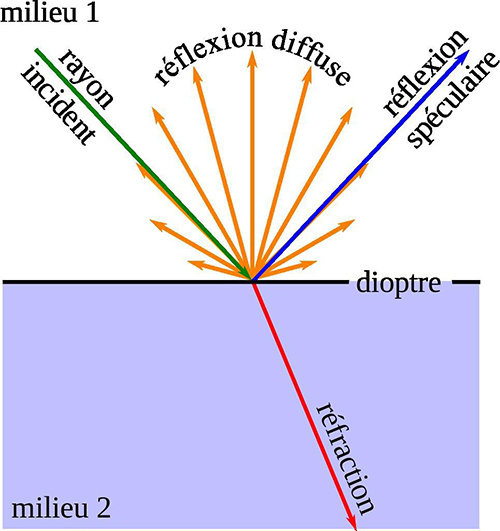
Bei bekannter Position und Ausrichtung des Sensors kann die Koordinate XYZ der reflektierenden Fläche, die durch einen Punkt dargestellt wird, berechnet werden. Durch mehrmaliges Wiederholen dieses Vorgangs erstellt das Instrument eine komplexe „Karte“, die aus allen vom LiDAR gesammelten Punkten zusammengesetzt ist. Im nachstehenden Schaubild wird die Brechung einer Welle auf einer Fläche dargestellt.
Ein Teil der Welle wird unter demselben Einfallswinkel (spekuläre Reflexion) reflektiert, ein anderer Teil der Welle wird über die Fläche gebrochen und ein letzter Teil der Welle wird diffus unter verschiedenen Einfallswinkeln reflektiert (diffuse Reflexion).
Übersicht der Spezifikationen des LiDAR
Abtasttechnologie
Diese Ferndetektionstechnik kann verwendet werden, um den Abstand zwischen Messinstrument und einem Hindernis zu messen. In diesem Fall spricht man von einem Entfernungsmesser.
Wenn der Sensor einen Abstastvorgang vornimmt, um den Abstand zwischen Sensor und umgebenden Hindernissen zu ermitteln, spricht man von einem LiDAR. Der LiDAR rotiert und misst den Abstand zu den Hindernissen in einem Winkelbereich bis zu 360°, d. h. in einem ganzen Kreis. Seine Drehgeschwindigkeit hängt von der Tastfrequenz ab, die zwischen 1 Hz und 100 Hz liegt.
Die verschiedenen Sichtsysteme des LiDAR
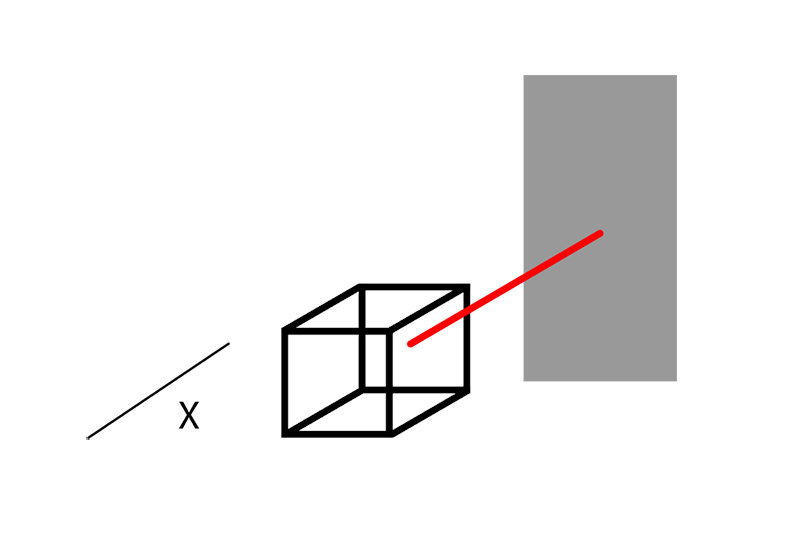
Es gibt drei LiDAR-Typen: 1D, 2D oder 3D. Sie funktionieren nach demselben Prinzip. Der Unterschied besteht lediglich in der Anzahl der genutzten Dimensionen. Bei einem 1D-Entfernungsmesser benötigt man einen einzigen festen Laserstrahl, der den Abstand zwischen zwei Punkten misst. Der erzielte Wert befindet sich auf einer einzigen Achse und ist somit eindimensional.
Bei einem 2D-LiDAR ist nur ein einziger Laserstrahl erforderlich. Er sendet einen Impuls in einer rotierenden Bewegung um eine horizontale Ebene aus und berechnet den Abstand zu den Hindernissen. Hierbei werden Daten auf der X- und Y-Achse erhalten.
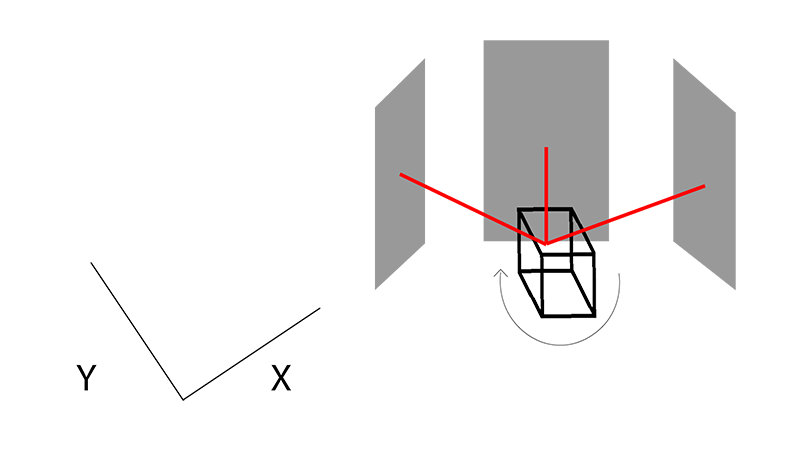
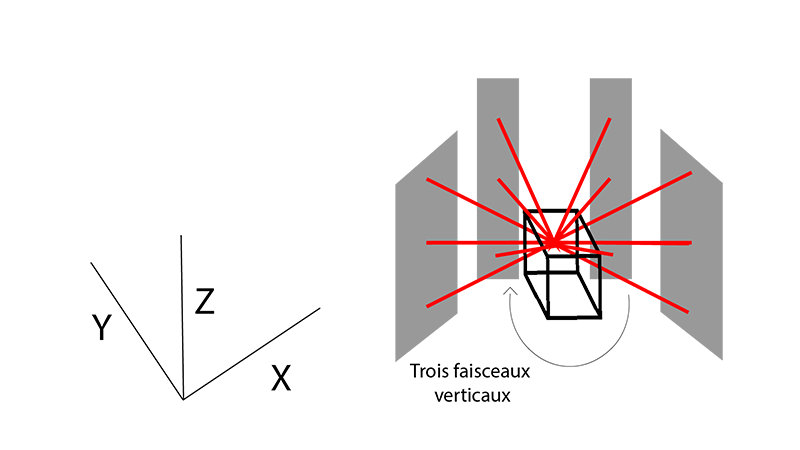
Ein 3D-LiDAR funktioniert nach demselben Prinzip, wobei jedoch mehrere Laserstrahlen auf der vertikalen Achse verteilt sind und diese horizontale, rotierende Abtastung ermöglichen. Hier werden Daten entlang der drei Achsen X, Y und Z erhalten. Jeder Laserstrahl besitzt einen Differenzwinkel Delta zu den anderen Strahlen auf einer vertikalen Ebene.
Wellenlänge
Die Wellenlänge des Lasers ist ein wichtiger Parameter des LiDAR. Die an der Oberfläche der Erde empfangene Sonnenstrahlung wird auf ein grosses Spektrum an Wellenlängen aufgeteilt:
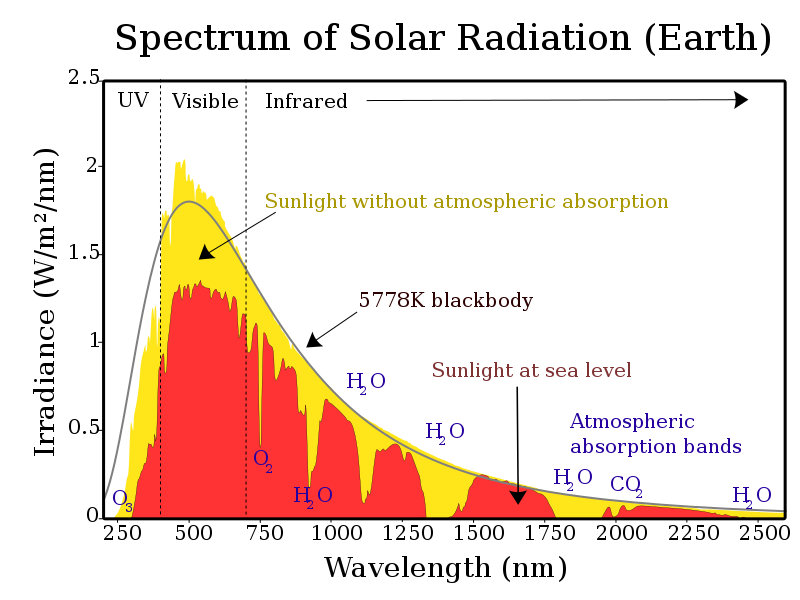
In dieser Grafik treten einige ungewöhnliche Tiefpunkte auf:
- 750 nm
- 940 nm
- 1125 nm
- 1400 nm
Leistungsstarke Laserstrahlen über Niveau 1 können das menschliche Auge schädigen und die Netzhaut beschädigen. Die LiDAR nutzen folgende Wellenlängen:
- Infrarot (1500 — 2000 nm) für Meteorologie/Doppler LiDAR — Forschungsanwendungen
- Nahinfrarot (850 — 940 nm) für terrestrische Kartographie
- Blau-Rot (500 — 750 nm) für Bathymetrie
- Ultraviolett (250 nm) für Meteorologie
Innenbereich/Aussenbereich
Alle LiDAR, die diesen technischen Normen entsprechen, können im Innenbereich verwendet werden. Lediglich einige Modelle können je nach technischen Daten im Freien eingesetzt werden. Folgende Faktoren müssen dabei berücksichtigt werden:
- Die Wellenlänge: Bei 500 nm produziert das Sonnenlicht den höchsten Störpegel.
- Unempfindlichkeit gegen Umgebungslicht (in Lux): Dieser Parameter steht für die Lichtmenge, die für einen korrekten Betrieb akzeptabel ist.
- Art der Oberfläche: transparente Fläche, Rauch, Nebel usw.
- Unempfindlichkeit gegen Umgebungsgeräusche: Regen, Schnee, Relief usw.
- Temperaturbereich: Akzeptierte Temperatur für eine gute Funktionsweise des LiDAR.
- Elektromagnetische Überlegungen: Physikalische Störungen, die das Verhalten des Sensors beeinflussen können.
Die LiDAR für den Aussenbereich sind kostspieliger, da sie höhere Leistungen aufweisen.
Abstand
Die Reichweite der LiDAR variiert zwischen 0,01 m und 200 m. Je nach Umgebungsbedingungen ist der LiDAR künstlichem Licht, Sonnenlicht, Oberflächengestaltungen, transparenten Elementen usw. ausgesetzt. Es muss immer ein LiDAR mit einem geeigneten Abstand ausgesucht werden. Im Innenbereich ist ein Erfassungsbereich bis zu 100 m beispielsweise nicht sehr sinnvoll.
Fehler
Alle LiDAR weisen zwei Fehlertypen bei ihren Messungen auf: Systematischer Fehler: Bei diesem Fehler werden alle Messungen systematisch und vorhersehbar verschoben. Die systematischen Fehler können nicht beseitigt werden, aber ihr Einfluss kann auf ein Minimum reduziert werden.
Zufallsfehler: Zusätzliche Fehler aufgrund der Umgebungsbedingungen und physikalischen Parameter (Brechung, Beugung usw.) können ebenfalls auftreten. Ein Zufallsfehler tritt auf, wenn bei genau denselben Messungen des LiDAR unterschiedliche Werte ermittelt werden. Der gesamte Abstandsfehler variiert zwischen ±10 mm und ±200 mm je nach LiDAR-Modell.
Stromversorgung
Alle LiDAR benötigen eine elektrische Stromversorgung. Je nach erforderlichem Spannungs- und Stromverbrauch der Komponenten kann der Energieverbrauch oder die Leistungsaufnahme berechnet werden. Bei Einsatz einer Batterie kommt diesem Parameter grosse Bedeutung zu, da ein LiDAR mit hohem Energieverbrauch den Batteriezyklus des Roboters reduziert.
Leistungen
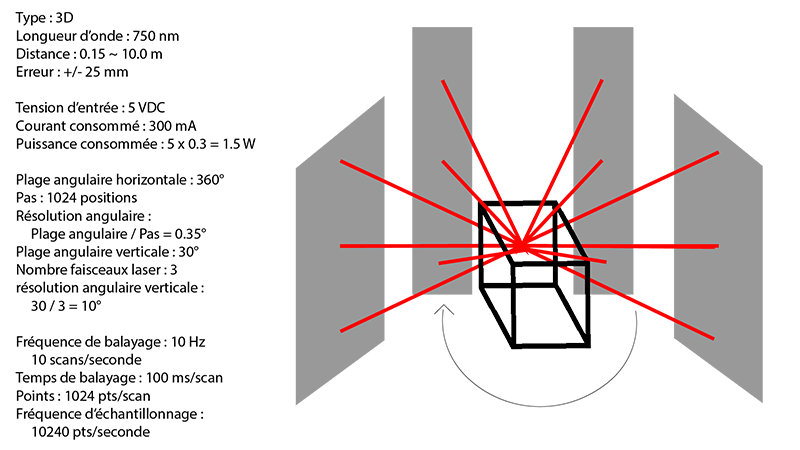
Winkelbereich
Dieser technische Kennwert gibt den möglichen Rotationsbereich des LiDAR an. Zum Beispiel: Ein LiDAR mit einem Winkelbereich von 360° kann eine komplette Rotation (einen vollständigen Kreis) im Betrieb ausführen. Liegt dieser Parameter unter 360°, kann der LiDAR seinen Umgebungsbereich nur teilweise messen, sodass immer ein Schattenbereich in jedem Tastzyklus vorhanden ist. Bei einem mobilen Roboter ist es wichtig, die gesamte Umgebung zu kartographieren, sodass ein Winkelbereich von 360° als sinnvoller Vorteil für einen LiDAR anzusehen ist.
Anzahl Positionen: Schritt
Dieser Parameter gibt die Anzahl der Positionen an, bei denen der LiDAR eine Messung in einem Tastzyklus durchführt. Zum Beispiel: Ein LiDAR mit 1024 Schritten und einem Winkelbereich von 360° nimmt eine Messung für alle Winkelbereiche vor. Schritt = 360°1024 = 0,35°. Wenn die Anzahl der Schritte zu niedrig ist, besitzt der Roboter nicht genug Punkte, um sicher eine Entscheidung zu treffen.
Winkelauflösung
Die Winkelauflösung ist das Ergebnis der obenstehenden Berechnung (0,35°) und gibt die Genauigkeit des LiDAR im Rotationsbereich an. In diesem Beispiel erfolgt ein Punkt alle 0,35°. Je niedriger diese Anzahl ist, desto höher ist die Qualität der generierten „Karte“. Sie sollten diesen Parameter aussuchen und die erforderliche Genauigkeit der generierten Umgebung kennen, damit sich der Roboter sicher fortbewegen kann.
Tastfrequenz
Dieser lineare Parameter gibt die Drehgeschwindigkeit des LiDAR-Motors an. Die Tastfrequenz gibt an, wie viele Rotationen der LiDAR in 1 Sekunde ausführen kann.
| Tastfrequenz | Winkelgeschwindigkeit | Drehgeschwindigkeit |
| 1 Hz | 360°/Sekunde | 60 U/min |
Zum Beispiel: Ein LiDAR mit einer Tastfrequenz von 10 Hz und einem Winkelbereich von 360° führt 10 vollständige Rotationen pro Sekunde aus. Die Wahl dieses Parameters ist wichtig, wenn sich Ihr Roboter schnell in seiner Umgebung bewegt oder wenn sich die Umgebung schnell um den Roboter bewegt. Niemand möchte eine Entscheidung treffen, ohne über die nötigen Informationen zu verfügen.
Tastzeit
Dieser Parameter wird wie folgt ermittelt: Tastzeit = 1Tastfrequenz = x Sekunden/Tastvorgang.
Punkte
Dies sind die Anzahl der gemessenen Punkte. Bei einem LiDAR mit einem Laserstrahl ist die Anzahl der Punkte pro Tastvorgang identisch mit der Anzahl von Schritten. Zum Beispiel: 1024 Punkte/Tastvorgang bedeutet, dass ein LiDAR mit einem Laserstrahl 1024 Punkte oder Sample-Daten in einem Tastzyklus aufweist.
Sampling-Rate
Dies entspricht der Anzahl der erfassten Punkte in einer Sekunde. Zum Beispiel: Ein LiDAR mit einem Winkelbereich von 360°, 1024 Schritten und einer Tastfrequenz von 10 Hz besitzt eine Sampling-Rate von 1024*10=10240 Punkten/Sekunde. Sie können einen dieser beiden Parameter (Schritt oder Tastfrequenz) verbessern, um die Menge der erhaltenen Daten pro Sekunde zu erhöhen.
Kommunikationsschnittstelle
Die Schnittstelle, der Controller und das Kommunikationsprotokoll eines LiDAR müssen an die Messung der Datenrate (I2C, PWM, SPI, Serie usw.) angepasst sein, damit keine Informationen verloren gehen. Ein wesentliches Element dabei ist, über dieselbe Datenübertragungsgeschwindigkeit (Baud Rate) zwischen LiDAR und PC oder mitgeführter Karte zu verfügen. Ist diese Geschwindigkeit zu niedrig, wird sich der Roboter nicht wie erwartet verhalten.
ROS
Das Robot Operating System (ROS) ist ein Set von Software-Bibliotheken und Tools, die die Entwicklung von Roboteranwendungen unterstützen sollen. Mit Treibern und hochmodernen Algorithmen sowie leistungsstarken Entwicklungstools ist ROS heute der Industriestandard für alle Projekte im Bereich der Robotertechnik. Es handelt sich um eine Open-Source-Lösung. Die LiDAR auf der Website von Génération Robots sind alle ROS-kompatibel. Sehen Sie sich unser LiDAR-Angebot an oder kontaktieren Sie uns , wenn Sie nähere Informationen zu dieser Technologie benötigen.
Schlussbemerkungen — Vorteile und Nachteile des LiDAR
Vorteile des LiDAR
- Die Daten können schnell und mit grosser Genauigkeit erfasst werden.
- Der LiDAR kann einfach in andere Sensoren integriert werden: Sonar, Kamera, IMU, GPS, ToF-Sensoren.
- Die LiDAR-Technologie kann dank eines aktiven Lichtsensors bei Tageslicht sowie im Dunkeln eingesetzt werden.
- Kann verwendet werden, um Daten an für den Menschen unzugänglichen Bereichen zu erfassen.
- LiDAR sind schnell und sehr präzise. Ein LiDAR ist ein ausgezeichnetes Werkzeug, um Daten in weitreichenden Landstrichen zu erfassen.
- Nach der korrekten Konfiguration ist ein LiDAR autonom und kann selbständig funktionieren.
Nachteile des LiDAR
- Der LiDAR kann je nach Anforderungen Ihres Projektes mit einem grossen Kostenaufwand verbunden sein.
- LiDAR können bei starkem Regen, niedrig liegenden Wolken, Nebel oder Rauch sowie bei Vorhandensein von transparenten Hindernissen nicht eingesetzt werden.
- Die Analyse einer umfangreichen Menge an erfassten Daten kann mit einem grösseren Aufwand an Zeit und Ressourcen verbunden sein.
- Die leistungsstarken Laserstrahlen einiger LiDAR können das menschliche Auge schädigen.
- Es ist schwierig, sehr dichtes Material damit zu durchdringen.
Abrufen der anderen Beiträge in unserer Reihe „LiDAR-Technologie“
Lesen Sie in unserer Rubrik LiDAR für Forschung und Innovation nach oder kontaktieren Sie uns für nähere Informationen oder einen Kostenvoranschlag.
Die LiDAR-Marken werden von Génération Robots vertrieben.
Lesen Sie in unserer Rubrik LiDAR für Forschung und Innovation nach oder kontaktieren Sie uns für nähere Informationen oder einen Kostenvoranschlag.
Die LiDAR-Marken werden von Génération Robots vertrieben.

|
|
|
|
|
|
|