Il braccio Panda è la versione V1 del braccio Franka Research 3 (FR3), sviluppato dal progettista tedesco FRANKA EMIKA.
Il seguente articolo ripercorre le fasi di un esperimento condotto dal centro di ricerca INRIA Bordeaux – Sud-Ouest, partner di lunga data dell’azienda Génération Robots. Nell’esperimento descritto in seguito, i ricercatori dell’INRIA hanno utilizzato un braccio collaborativo per assistere i falegnami durante la lavorazione del legno, con l’obiettivo di ridurre (o addirittura eliminare) il rischio di incidenti.
La pubblicazione frutto di questa esperienza ha vinto il premio come miglior articolo del 2020 nella categoria Automazione durante la conferenza ICRA 2020. L’ICRA è una conferenza internazionale dedicata alla robotica e all’automazione. L’edizione del 2020 ha riunito in modalità virtuale oltre 4.000 ricercatori da tutto il mondo (a causa della crisi sanitaria).
Workshop, keynote e sessioni plenarie hanno permesso ai partecipanti di confrontarsi sulle nuove innovazioni in ambito robotico, in particolare nel contesto della lotta contro il coronavirus.
Garantire la sicurezza degli artigiani grazie alla robotica collaborativa
Obiettivo: ridurre (o meglio eliminare) il rischio di incidenti per i falegnami durante l’utilizzo di una sega circolare da banco nelle operazioni di taglio delle tavole.
Metodo: assistere l’artigiano con un terzo braccio, robotico e autonomo, il cui unico compito è garantire la sua sicurezza.
Carpenteria, un’attività ad alto rischio
Motivo della scelta di questa attività: la lavorazione del legno è stata scelta come mansione pilota di questo progetto per la sua importanza nella carpenteria, ma anche per la gravità degli incidenti che comporta.
L’IRIS-ST (Istituto francese per la Ricerca e l’Innovazione sulla Salute e la Sicurezza sul Lavoro) ha registrato 5.118 infortuni tra 61.764 falegnami e carpentieri nel solo anno 2016.
Il 27% di questi incidenti ha riguardato l’uso di attrezzatura.
Secondo un altro studio condotto su 1.200 apprendisti carpentieri, l’80% di loro aveva già assistito ad almeno un incidente sul luogo di lavoro (J. Hester et al.).
Riflessione sulla robotizzazione dei compiti d’utilizzo del legno per ridurre il rischio di incidenti
Oggi esistono soluzioni industriali automatizzate per numerose operazioni di lavorazione, come la metallurgia o la produzione di componenti elettronici. Tuttavia, queste soluzioni risultano inadeguate alla lavorazione del legno, che richiede prima di tutto flessibilità, adattabilità e delicatezza.
Inoltre, tali soluzioni risultano troppo costose per le piccole imprese.
Pertanto, i robot collaborativi si presentano come una soluzione interessante: meno costosi, versatili, e in grado di preservare il know-how artigianale.
Sono state anche valutate soluzioni alternative al posto del braccio robotico collaborativo per assistere gli artigiani del legno e migliorare la loro sicurezza. È il caso, ad esempio, di un esoscheletro, pensato per aumentare la forza fisica dell’artigiano, riducendo di conseguenza i rischi di incidente legati alla fatica o a spinte eccessive.
Svolgimento dell’esperimento sull’impiego di un braccio collaborativo nelle operazioni di taglio delle tavole
Nell’esperimento illustrato in seguito, il braccio robotico utilizzato è il robot Panda, prodotto dall’azienda tedesca FRANKA EMIKA e distribuito in Francia da Génération Robots.
Panda è un braccio robotico di alta qualità costruttiva, dotato di 7 gradi di libertà e compatibile con ROS.
È dotato di sensori di coppia su ciascun asse, che gli attribuiscono un’elevata compliance (capacità di adattarsi alle forze esterne), una caratteristica particolarmente richiesta in questo contesto applicativo.

Inoltre, essendo accessibile dal punto di vista economico rispetto ad altri bracci collaborativi simili, le sue specifiche tecniche erano perfettamente adatte a questo esperimento.
Sei alla ricerca di un braccio robotico per il tuo progetto? ti invitiamo a consultare il nostro articolo “I fattori da considerare prima dell’acquisto di un braccio robotico”, che ti aiuterà nella tua scelta.
La missione del braccio robotico collaborativo
Gli incidenti durante la lavorazione del legno hanno luogo principalmente quando la lama della sega incontra un nodo nel legno. Ciò che provoca un cambiamento improvviso nei parametri di spinta (velocità o direzione), che sorprende l’artigiano.
Il braccio collaborativo fungerà da protezione per l’artigiano, permettendogli di continuare a tagliare le tavole facendole scivolare sulla superficie verso la sega circolare, ma il suo movimento sarà accompagnato dal braccio robotico. Quest’ultimo sarà in grado di rilevare immediatamente un cambiamento di velocità o direzione della tavola e adeguare subito la forza di spinta per compensare tale variazione.
Con questo sistema, l’artigiano non dovrebbe più incontrare improvvisi cambiamenti nella velocità di scorrimento della tavola, riducendo in tal modo il rischio di incidenti.
Il vantaggio di questa soluzione è che l’uomo non viene sostituito dalla macchina, ma semplicemente assistito. L’artigiano mantiene il controllo del taglio e resta in contatto con il materiale che sta lavorando.
Fase 1 dell’esperimentazione: creazione di un modello digitale
Il team di ricerca ha iniziato creando un modello virtuale di una sega circolare montata su un banco da lavoro, controllata da un operatore umano. Questo modello digitale è stato successivamente implementato in MatLab.
In questa simulazione, possono essere modificati diversi parametri, come la forza di spinta, lo spessore della tavola, la presenza e la posizione dei nodi nel legno, la velocità di rotazione della sega…
Grazie a questo modello virtuale, i ricercatori hanno potuto avviare e studiare simulazioni di situazioni potenzialmente pericolose per l’artigiano, che potrebbero essere causa di incidenti.
Questo modello consente di generare numerose simulazioni di lavorazione, che siano ottimali o potenzialmente pericolose.
Fase 2 dell’esperimentazione: riproduzione della simulazione nella realtà
Costruzione del modello
Per confermare le osservazioni fatte grazie alla simulazione sull’impatto di una variazione improvvisa della velocità di taglio, il team ha progettato un esperimento.
Per evitare qualsiasi incidente, il team dell’INRIA Bordeaux – Sud-Ovest ha ritenuto opportuno creare una falsa tavola da taglio composta da un binario di guida montato su un banco, lungo il quale è possibile far scivolare una tavola. Un braccio robotico Panda di FRANKA EMIKA completa l’installazione.

Un sistema di contrappeso situato sotto il banco permette di regolare la velocità di scorrimento della tavola, al fine di riprodurre quella di una tavola da taglio.
Test concreti
Il team di ricercatori ha chiesto a 3 persone diverse di simulare un taglio di tavola su questo modello. Ciascuna di esse ha eseguito 5 test, poi registrati e misurati. Prima di questi test, i 3 individui hanno avuto l’opportunità di effettuare alcuni tentativi per abituarsi all’installazione e ai movimenti da compiere.
Durante i vari test, i ricercatori hanno simulato tagli su nodi, causando un brusco cambiamento di velocità.
Quando queste simulazioni di passaggio attraverso un nodo si sono prodotte per l’ultimo partecipante ai test, il braccio Panda ha applicato una forza verticale costante aggiuntiva verso il basso di 50N (il criterio di esecuzione era un tasso di variazione della velocità planare superiore a 20 m/s²).
I risultati sottostanti rappresentano i tre casi derivati dalla simulazione di un nodo nel legno:
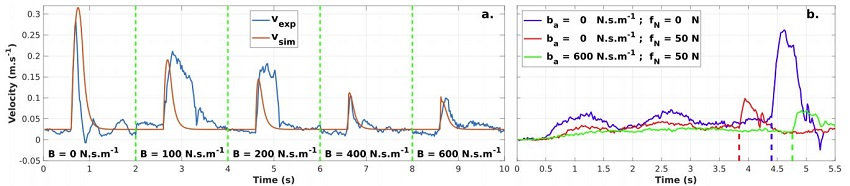
- Caso 1: nessun intervento del robot (curva blu)
- Caso 2: il robot applica una forza costante verticale (curva rossa)
- Caso 3: il robot applica una forza costante verticale (frenata) e, allo stesso tempo, un’azione di smorzamento orizzontale massimo (curva verde)
Conclusione dell’esperimento
Il confronto e l’ottimizzazione dei casi delle figure 2 e 3 (vedi sopra) dovrebbero idealmente essere oggetto di ricerche approfondite.
I risultati sono promettenti e ci rivelano che la simulazione è uno strumento che può essere utilizzato per progettare modelli di controllo avanzati. Un miglioramento del modello virtuale sarebbe interessante, soprattutto per tener conto delle competenze e del livello di esperienza dell’artigiano virtuale, fattori da non sottovalutare.
In questo tipo di lavoro viene mostrato che complessivamente i robot collaborativi potrebbero avere un ruolo importante nel settore dell’artigianato, dove potrebbero portare significativi progressi in termini di sicurezza e prevenzione degli incidenti.
Consulta la pubblicazione del team di ricerca qui: Securing Industrial Operators with Collaborative Robots: Simulation and Experimental Validation for a Carpentry task