Negli ultimi anni, le prestazioni dei robot quadrupedi hanno registrato un continuo miglioramento, anche su terreni irregolari. Oggi i robot mobili sono perfettamente adatti a missioni di ispezione, sebbene inizialmente non fossero stati progettati per operazioni di presa. Gli ingegneri che si occupano di robot quadrupedi spesso integrano delle periferiche esterne; questo permette di moltiplicare il numero di operazioni che i robot sono capaci di svolgere. E ciò che fanno i robotisti presso Unitree Robotics, un vero leader sul mercato che si occupa di progettazione di robot-cani. Grazie all’IA e ai numerosi sensori disponibili sul mercato, è ormai possibile insegnare a un robot-cane non solo a raccogliere degli oggetti e premere pulsanti, ma anche a svolgere compiti ancora piu complessi.
Un’università americana utilizza la “politica unificata” per coordinare un braccio manipolatore con il robot Go1 di Unitree Robotics
Il braccio robotico può aumentare notevolmente il campo di applicazioni dei robot quadrupedi.
Il metodo base per i quadrupedi dotati di un braccio robotico consiste nel far in modo che il controller gestisca separatamente la camminata e la prensione. Questo metodo, però, non è il migliore in quanto richiede molto tempo e molti sforzi per essere implementato. In più, il rischio di commettere errori che possono propagarsi tra i vari moduli e la probabilità di movimenti a scatti sono elevati.
Per affrontare questa problematica, la Carnegie Mellon University di Pittsburgh ha deciso di adottare l’apprendimento per rinforzo e testare un sistema basato su una politica unificata in grado di controllare l’intero sistema (quadrupede + braccio). Questo approccio consente di ottenere movimenti più fluidi, più precisi e una migliore coordinazione bracci/zampe.
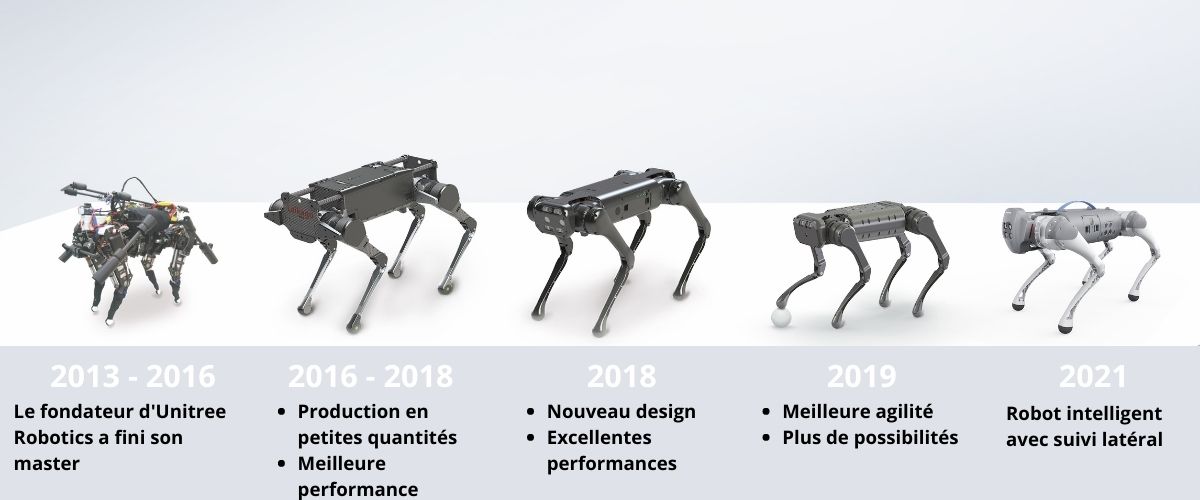
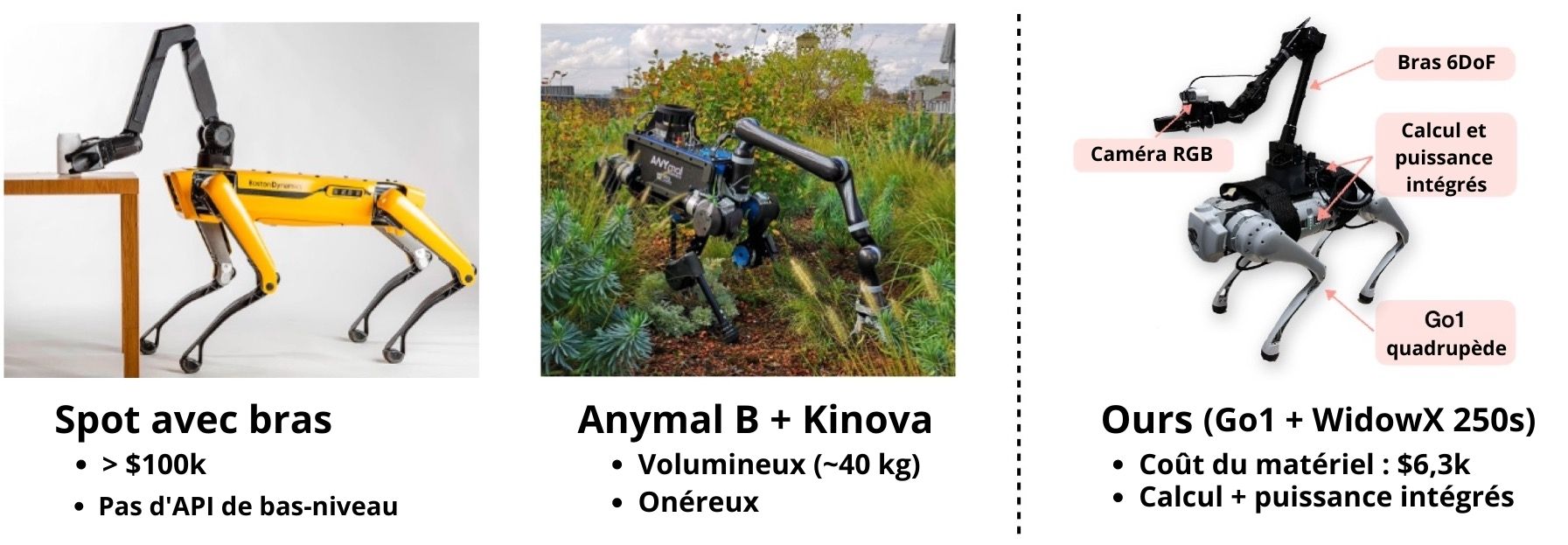
Nel progetto, condotto da due studenti e dal loro professore, è stato utilizzato il robot Go1 di Unitree Robotics, noto per la sua affidabilità e le sue ottime prestazioni a un costo contenuto. Il braccio montato sul robot è il WidowX 250 (a 6 assi) della Trossen Robotics.
L’esperimento ha dimostrato che il sistema con politica unificata permette di ottenere comportamenti agili e dinamici in diverse situazioni.
La “politica unificata” consente di ottenere comportamenti agili e dinamici del corpo e del braccio robotico.
Confronto
I manipolatori commerciali, come il Boston Dynamics Spot with Arm, rappresenta un investimento importante per le università o i laboratori di ricerca. Il team del progetto ha trovato un’alternativa meno costosa scegliendo i marchi Unitree Robotics e Trossen Robotics, per la progettazione della loro piattaforma autonoma.
Teleoperazione
La politica unificata permette di controllare tutte le articolazioni (12DoF per le zampe e 6DoF per i bracci) a 50 Hz utilizzando solo una Raspberry Pi..
L’architettura software del braccio WindowX 250s è installata sulla NVIDIA Jetson del robot-cane Go1 grazie ai packages ufficiali forniti da Trossen Robotics. Il protocollo UDP è utilizzato per la comunicazione tra Raspberry Pi e NVIDIA Jetson.
L’apertura e la chiusura del gripper non sono parte della politica unificata e sono controllate da un joystick durante le varie sperimentazioni di teleoperazione. Durante i test basati sul comportamento visivo, il gripper viene gestito da una politica scriptata.
Attraverso questa combinazione di apprendimento per rinforzo e politica unificata, la piattaforma robotica può funzionare in modo completamente autonomo in 3 modalità: teleoperazione, tracciamento visivo e ripetizione delle dimostrazioni. Pertanto, il robot è in grado di:
- Inserire una penna in un bicchiere distante
- Raccogliere un bicchiere e gettarlo in un cestino situato in alto
- Raccogliere un oggetto su un terreno irregolare
- Premere un pulsante per entrare in un edificio
Tracciamento visivo
Per il tracciamento visivo, il robot è dotato di una telecamera di profondità RealSense D435i di Intel.
Il robot è incaricato di seguire un AprilTag, e la politica unificata regola automaticamente il controllo del corpo per seguire l’AprilTag. Come possiamo notare, il robot piega le sue zampe in coordinazione con il braccio, con il fine di mantenere la telecamera vicina all’AprilTag.
Ripetizione delle dimostrazioni
Interessato/a?
Il nostro ufficio di progettazione ingegneristica è in grado di rispondere a molteplici problematiche innovative, come l’integrazione di un braccio manipolatore su un robot autonomo o semi-autonomo. Abbiamo recentemente integrato dei bracci collaborativi su 4 robot mobili omnidirezionali: scopri il nostro caso di studio.