Consulta gli altri articoli della nostra serie “Tecnologia LiDAR”
 |
Definizione – Cos’è la tecnologia Lidar?
Un LiDAR è un componente elettronico che fa parte della famiglia dei sensori. Più precisamente, rientra nella categoria dei sensori a tempo di volo (ToF). Un sensore raccoglie dati su un parametro fisico come la temperatura, l’umidità, la luce, il peso, la distanza, ecc.
L’acronimo LiDAR significa Light Detection And Ranging. Si tratta di un metodo di calcolo che permette di determinare la distanza tra il sensore e l’ostacolo bersaglio. Un LiDAR utilizza un raggio laser per il rilevamento, l’analisi e il tracciamento.

Fenomeno fisico – Come funziona?
La tecnologia LiDAR è una tecnologia di telerilevamento che misura la distanza tra il sensore e un bersaglio. La luce viene emessa dal LiDAR e diretta verso il bersaglio. Questa viene riflessa dalla sua superficie e ritorna alla sorgente. Poiché la velocità della luce è una grandezza costante, il LiDAR è in grado di calcolare la distanza che lo separa dal bersaglio.
Distanza = (velocità della luce × tempo di volo) / 2
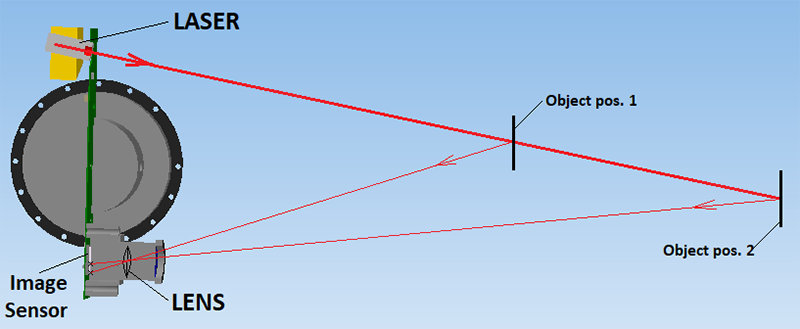
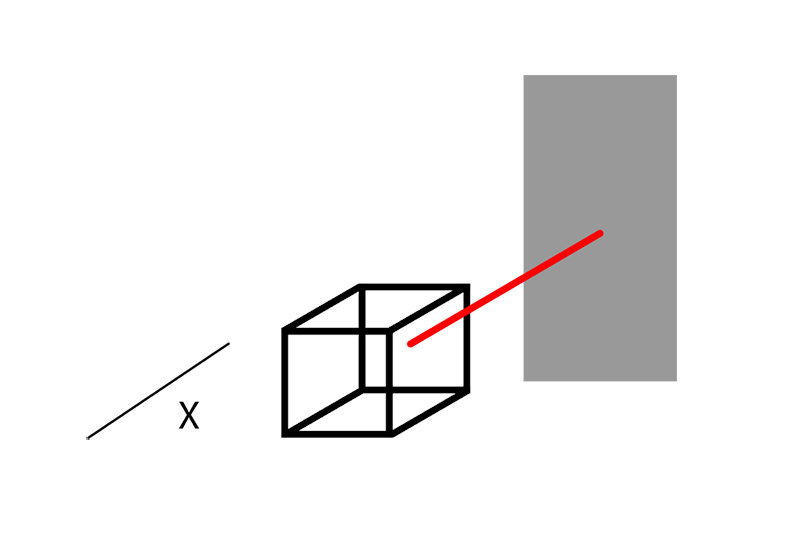
Conoscendo la posizione e l’orientazione del sensore, è possibile calcolare la coordinata XYZ della superficie riflettente, rappresentata da un punto.
Ripetendo questo processo più volte, lo strumento ne crea una “mappa” complessa composta da tutti i punti raccolti dal LiDAR.
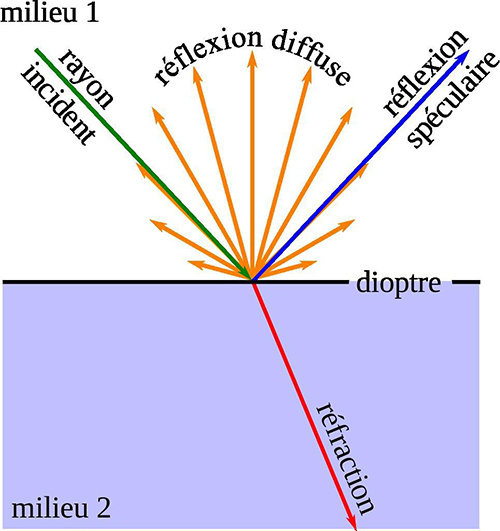
Il diagramma seguente spiega come un’onda si rifrange su una superficie. Una parte dell’onda viene riflessa con lo stesso angolo di incidenza (riflessione speculare), un’altra parte viene rifratta attraverso la superficie, mentre l’ultima parte viene riflessa in modo diffuso con angoli di incidenza diversi.
Panoramica delle caratteristiche del LiDAR
Tecnologia di scansione
Questa tecnologia di telerilevamento può essere utilizzata per misurare la distanza tra lo strumento di misura e un ostacolo; in questo caso, si parla di metro laser. Se il sensore esegue una scansione per ottenere le distanze tra il sensore e gli ostacoli circostanti, allora si parla di LiDAR.
Il LiDAR ruota e misura la distanza dagli ostacoli su un intervallo angolare fino a 360°, ovvero un cerchio completo. La sua velocità di rotazione dipende dalla frequenza di scansione, che varia tra 1 Hz e 100 Hz.
I diversi sistemi di visione del LiDAR
Esistono tre tipi di LiDAR: 1D, 2D e 3D. Il loro funzionamento è simile, ma la differenza sta nel numero di dimensioni utilizzate.
Per un metro laser 1D, è sufficiente un unico fascio laser fisso che misura la distanza tra due punti. Il dato ottenuto è su un unico asse, quindi in una dimensione.
Nel caso di un LiDAR 2D è necessario un solo fascio laser. Infatti, emette impulsi seguendo un movimento di rotazione sul piano orizzontale e calcola la distanza dagli ostacoli, in tal modo ottenendo dati sugli assi X e Y.
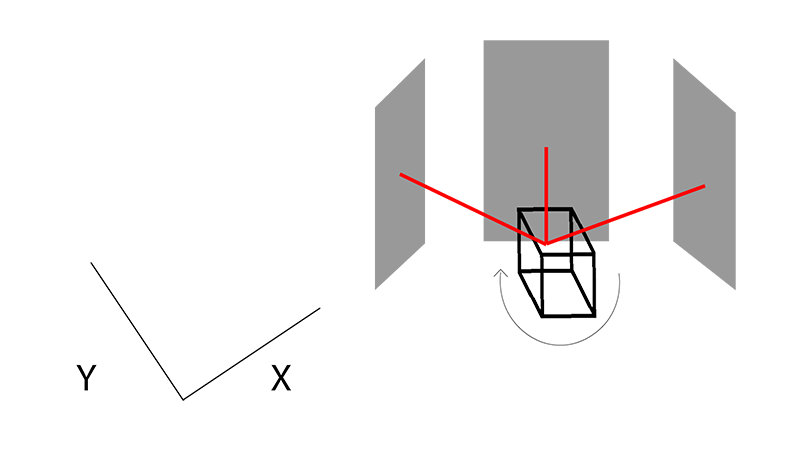
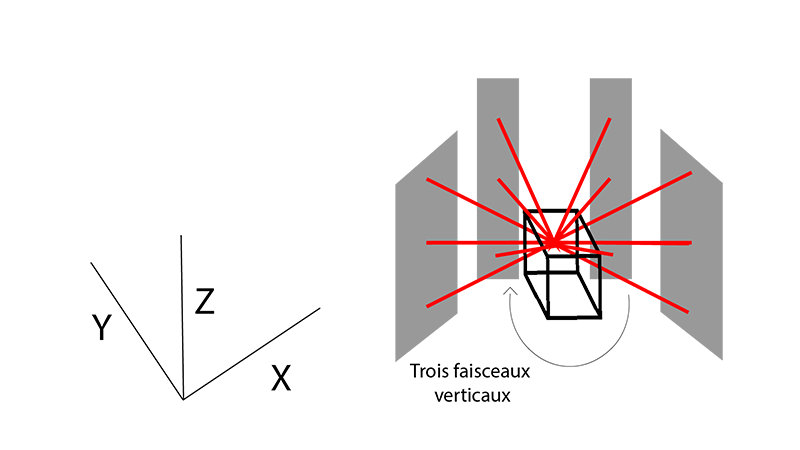
Nel caso di un LiDAR 3D, il principio è lo stesso, ma vengono utilizzati più fasci laser distribuiti lungo l’asse verticale, mantenendo sempre la scansione circolare orizzontale. In questo modo si ottengono dati sui tre assi X, Y e Z. Ogni fascio laser avrà un angolo di differenza delta rispetto agli altri fasci sul piano verticale.
Lunghezza d’onda
La lunghezza d’onda di un laser è un parametro importante per il LiDAR. Infatti, la luce solare ricevuta sulla superficie terrestre è distribuita su un ampio spettro di lunghezze d’onda:
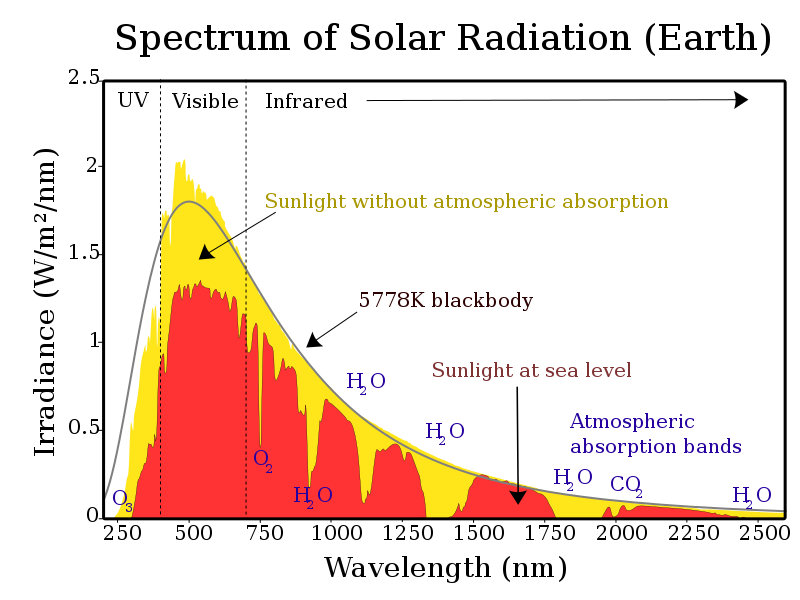
In questo grafico, alcuni cali di intensità si distinguono:
- 750 nm
- 940 nm
- 1125 nm
- 1400 nm
Fasci laser più potenti rispetto al livello 1 possono essere nocivi per l’occhio umano e danneggiare la retina.
Le lunghezze d’onda utilizzate dai LiDAR sono:
- Infrarosso (1500 – 2000 nm) → per la meteorologia/Doppler LiDAR – applicazioni scientifiche
- Vicino infrarosso (850 – 940 nm) → per la mappatura terrestre
- Blu-rosso (500 – 750 nm) → per la batimetria
- Ultravioletto (250 nm) → per la meteorologia
Interno/Esterno
Tutti i LiDAR conformi a questi standard tecnologici possono essere utilizzati in ambienti interni. Solo alcuni di essi possono essere utilizzati all’esterno, a seconda delle loro caratteristiche. I seguenti fattori devono essere presi in considerazione:
- Lunghezza d’onda: a 500 nm, la luce solare genera il livello più alto di interferenza.
- Resistenza alla luce ambientale (in Lux): parametro che indica la quantità di luce che il LiDAR può tollerare per funzionare correttamente.
- Tipo di superficie: superficie trasparente, fumo, nebbia, ecc.
- Capacità di resistenza ai rumori ambientali: pioggia, neve, rilievo, ecc.
- Intervallo di temperatura: temperature accettabili per il corretto funzionamento del LiDAR.
- Considerazioni elettromagnetiche: interferenze fisiche che possono modificare il comportamento del sensore.
I LiDAR per esterni sono più costosi a causa delle loro prestazioni superiori.
Distanza
La portata dei LiDAR varia da 0,01 m a 200 m. A seconda dell’ambiente, il LiDAR sarà esposto a luce artificiale, luce solare, rilievi, elementi trasparenti, ecc. È quindi importante scegliere un LiDAR con una distanza adeguata. Per l’uso indoor, infatti, una distanza di rilevamento fino a 100 m potrebbe non essere particolarmente utile.
Errore
Tutti i LiDAR presentano due tipi di errori nelle loro misurazioni:
Errore sistematico: questo tipo di errore sposta tutte le misure in modo sistematico e prevedibile. L’errore sistematico non può essere eliminato, ma la sua influenza può essere ridotta.
Errore casuale: ulteriori errori possono verificarsi a causa dell’ambiente e di parametri fisici (rifrazione, diffrazione, ecc.). Un errore casuale si verifica quando le stesse identiche misurazioni effettuate dal LiDAR mostrano valori diversi.
L’errore totale della distanza varia tra ±10 mm e ±200 mm, a seconda del tipo di LiDAR.
Alimentazione elettrica
Tutti i LiDAR necessitano di un’alimentazione elettrica. A seconda della tensione richiesta e della corrente assorbita dai componenti, si può calcolare il consumo energetico o la potenza assorbita. Un parametro estremamente importante è l’alimentazione a batteria: un LiDAR con un alto consumo energetico ridurrà significativamente l’autonomia della batteria del robot.
Prestazioni
Intervallo angolare
Questa tecnica specifica indica l’intervallo di rotazione possibile del LiDAR.
Ad esempio, un LiDAR con un intervallo angolare di 360° può effettuare una rotazione completa (un cerchio completo) durante il suo funzionamento. Se questo valore è inferiore a 360°, il LiDAR misurerà solo una parte dell’ambiente, lasciando delle zone d’ombra ad ogni ciclo di scansione.
Per un robot mobile, è importante fare una mappatura di tutto l’ambiente circostante. Pertanto, un LiDAR con un intervallo angolare di 360° rappresenta un vero vantaggio.
Numero di posizioni: il passo
Questo parametro indica il numero di posizioni in cui il LiDAR effettua una misurazione in un ciclo di scansione.
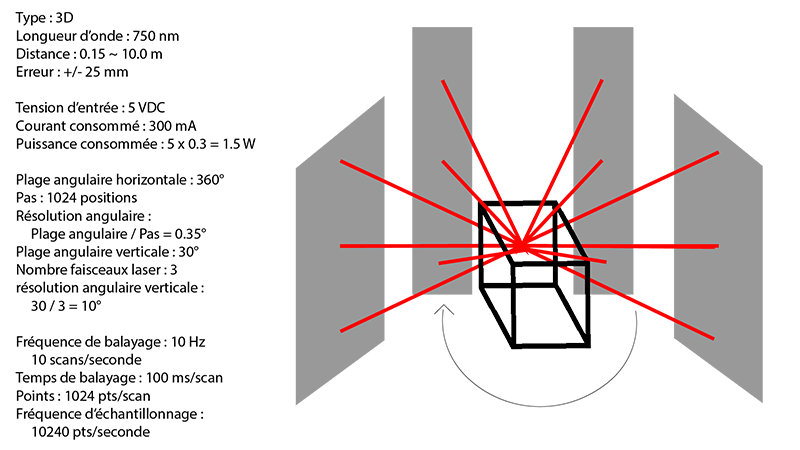
Ad esempio, un LiDAR con 1024 passi e un intervallo angolare di 360° eseguirà una misurazione ogni intervallo angolare:
Passo = 360° / 1024 = 0,35°
Se il numero di passi è troppo basso, il robot non avrà abbastanza punti per prendere decisioni in modo sicuro.
Risoluzione angolare
La risoluzione angolare è il risultato del calcolo precedente (0,35°); indica la precisione del LiDAR nel suo intervallo di rotazione. In questo esempio, si avrà un punto ogni 0,35°. Di conseguenza, minore è questo valore, maggiore sarà la qualità della mappa generata. È importante scegliere questo parametro in base alla precisione necessaria dell’ambiente generata dal robot per consentirgli di muoversi in sicurezza.
Frequenza di scansione
Questo parametro indica la velocità di rotazione del motore del LiDAR, ovvero quante rotazioni complete il LiDAR può eseguire in un secondo.
| Frequenza di scansione | Velocità angolare | Velocità di rotazione |
| 1 Hz | 360°/secondo | 60 rpm (giri/min) |
Ad esempio, un LiDAR con frequenza di scansione di 10 Hz e intervallo angolare di 360° effettuerà 10 rotazioni complete al secondo.
La scelta di questo parametro è fondamentale quando un robot si muove rapidamente nell’ambiente a lui circostante o quando l’ambiente attorno al robot cambia rapidamente. Infatti, non si vogliono prendere decisioni con la mancanza di informazioni.
Tempo di scansione
Il tempo di scansione è calcolato attraverso la formula: 1Frequenza di scansione = x secondi/scansione
Punti
Indica il numero di punti misurati. Per un LiDAR con un solo fascio laser, il numero di punti per scansione è uguale al numero di passi.
Ad esempio, 1024 punti per scansione significa che un LiDAR con un fascio laser raccoglierà 1024 punti o campioni in un ciclo di scansione.
Frequenza di campionamento
Indica il numero di punti rilevati in un secondo.
Ad esempio, un LiDAR con un intervallo angolare di 360°, 1024 passi e una frequenza di scansione di 10 Hz, avrà una frequenza di campionamento pari a: 1024*10=10240 punti/secondo.
Per aumentare la quantità di dati ricevuti al secondo, è possibile migliorare uno dei due parametri: i passi o la frequenza di scansione.
Interfaccia di comunicazione
L’interfaccia, il controller e il protocollo di comunicazione da utilizzare con il LiDAR devono essere in grado di seguire la misura della velocità dei dati (I2C, PWM, SPI, seriale, ecc.) in modo tale da evitare la perdita di informazioni.
Un elemento essenziale è raggiungere la stessa velocità di trasmissione dei dati (baud rate) tra il LiDAR e il PC o la scheda embedded. Se questa velocità è troppo bassa, il comportamento del sistema non corrisponderà a quello previsto.
ROS
Il Robot Operating System (ROS) è un insieme di librerie software e strumenti progettati per facilitare lo sviluppo di applicazioni robotiche. Dai driver agli algoritmi avanzati, fino agli strumenti di sviluppo più potenti, ROS è oggi uno standard industriale per qualsiasi progetto di robotica. Si tratta di una soluzione open-source.
Tutti i LiDAR presenti sul sito di Génération Robots sono compatibili con ROS. Non esitate a consultare la nostra selezione di LiDAR o a contattarci per ulteriori informazioni su questa tecnologia.
Conclusione – Vantaggi e svantaggi del LiDAR
Vantaggi del LiDAR
- I dati possono essere raccolti rapidamente e con elevata precisione
- Il LiDAR può essere facilmente integrato con altri sensori: sonar, telecamere, IMU, GPS, sensori ToF
- La tecnologia LiDAR può funzionare sia alla luce del giorno che al buio, grazie a un sensore di illuminazione attivo
- Può essere utilizzato per raccogliere dati in luoghi dove l’uomo non può accedervi
- I LiDAR sono rapidi e molto precisi. Sono un eccellente strumento per la raccolta di dati su ampie superfici
- Una volta configurato correttamente, un LiDAR è una tecnologia autonoma e può operare in modo indipendente
Svantaggi del LiDAR
- Il LiDAR può essere costoso a seconda delle specifiche richieste per il progetto
- I LiDAR non sono efficaci in caso di forti piogge, nuvole basse, nebbia, fumo o in presenza di ostacoli trasparenti
- L’analisi della grande quantità di dati raccolti può richiedere tempo e risorse
- I potenti fasci laser utilizzati in alcuni LiDAR possono danneggiare la vista
- È difficile penetrare materiali molto densi
Consulta gli altri articoli della nostra serie “Tecnologia LiDAR”
|
Consulta la sezione LiDAR per la ricerca e l’istruzione superiore oppure contattaci per maggiori informazioni o per richiedere un preventivo.
Marchi di LiDAR distribuiti da Génération Robots
 |
||