
Un kit ROS di ricerca e sviluppo creato da GR Lab e progettato specificamente per i robot mobili di AgileX Robotics.
L’ufficio di progettazione ingegneristica di Génération Robots (GR Lab) ha sviluppato un kit ROS di ricerca e sviluppo, adattabile ai robot mobili AgileX Robotics, che integra tutto il materiale necessario per lo sviluppo di programmi robotici.
Questo kit offre una soluzione robotica pronta per lo sviluppo, creata per risparmiare tempo di assemblaggio.
- Meccanica : integrazione di componenti nella base mobile
- Elettrica : collegamento di tutte le apparecchiature tra loro
- Software : installazione di “pacchetti” ROS di componenti
I componenti utilizzati da GR Lab sono:
- Un potente PC progettato per sviluppare algoritmi avanzati
- Una IMU (unità di misura inerziale)
- Una telecamera di profondità
- Un LiDAR 3D
- Un GPS compatibile RTK (Real Time Kinematic)
- Un modem 4G (o 5G opzionale)
I componenti possono essere modulati in base alle preferenze o alle esigenze del cliente.
Padronanza del software: Installazione di sistema operativo, ROS e VNC
Oltre all’integrazione elettronica e meccanica, i nostri ingegneri hanno gestito la parte software installando il sistema operativo sui PC tramite Linux Ubuntu. Questa procedura prevede l’integrazione del ROS (Robot Operating System) e di vari pacchetti di componenti indispensabili per il corretto funzionamento.
Parallelamente al ROS, stiamo implementando anche uno strumento essenziale, il VNC (Virtual Network Computing), che offre tramite una pagina dedicata la possibilità di connettersi al desktop del computer di bordo. Questo permette di conoscere in ogni momento lo stato del computer, ma anche di avere feedback sulle informazioni fornite dai sensori integrati nel kit.
Il nostro obiettivo: una volta ricevuto il robot mobile dotato del kit ROS di ricerca e sviluppo, i nostri clienti potranno immediatamente iniziare a sviluppare il loro programma e a lavorare sulla loro applicazione. Il kit di ricerca e sviluppo elimina la necessità di dover sviluppare prima un sistema informativo.
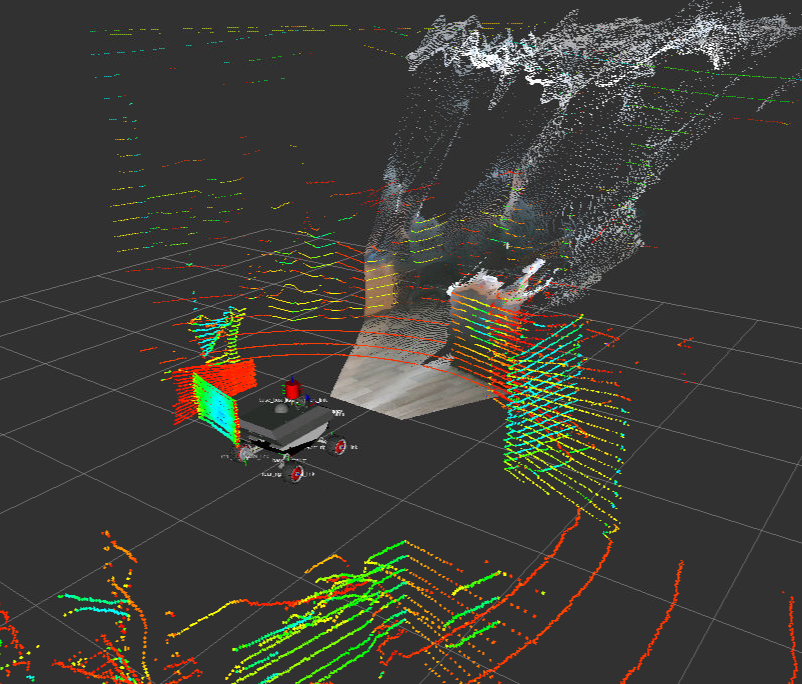
Una vista che mostra il ritorno dei dati dei sensori con al centro il modello 3D (URDF) del robot.
Vista disponibile su ROS tramite il pacchetto sviluppato dal GR Lab.
Esempio concreto: Il laboratorio di ricerca di Fraunhofer
Il GR Lab ha sviluppato un pacchetto ROS su misura per l’Università di Fraunhofer, con sede in Germania. Per questo progetto l’università ha scelto i robot mobili SCOUT MINI e HUNTER 2.0, sui quali abbiamo montato un kit ROS R&D personalizzato per le esigenze del cliente (aggiunta di sensori specifici). L’università prevede di utilizzare questi robot mobili e i kit di ricerca e sviluppo in progetti studenteschi sullo sviluppo di algoritmi di navigazione.
Il GR Lab ha selezionato i seguenti componenti per soddisfare al meglio le esigenze del cliente:
- Un potente PC progettato per sviluppare algoritmi avanzati
- Una IMU (unità di misura inerziale)
- La telecamera di profondità Realsense D435
- Le LiDAR 3D Helios 16P
- Un GPS compatibile RTK (Real Time Kinematic)
- Un modem 4G (o 5G opzionale)
