Humanoid robots
Humanoid robots represent the forefront of robotic technology, offering unique proximity and interaction with humans. Here are some of the humanoid robots sold at Génération Robots:
Nao: THE reference in education and research
Nao is an interactive humanoid robot used in research, education, and entertainment. With its charming personality and ability to interact with people, Nao is a versatile robotic companion.
Booster T1: The open-source humanoid robot for developers and researchers
The Booster T1 is a lightweight and high-performance open-source humanoid robot designed for developers and researchers, featuring a complete API, ROS2 compatibility, and advanced simulation and AI capabilities.
Reachy: an open-source, modular, and fully customizable robot
Created by Pollen Robotics, Reachy is an open-source humanoid robot with articulated arms and hands. Its ability to manipulate objects with precision makes it a valuable tool in robotics research and assistance for people with reduced mobility.
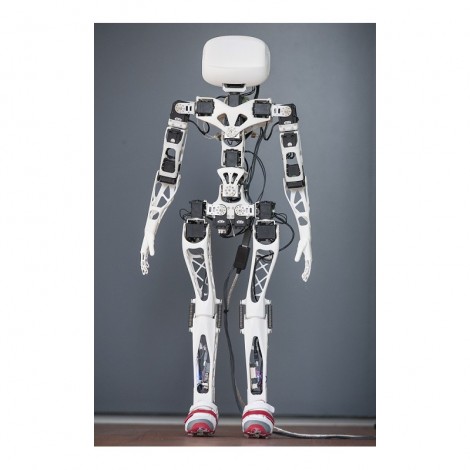
Poppy: an open-source platform for creating, using, and sharing interactive robotic objects
The humanoid robot Poppy, born from French research, embodies the eponymous technological platform. Based on open-source design, it integrates 3D printed components and Dynamixel servomotors, known for their reliability. Poppy caters to beginners and experts alike in the fields of education, science, and art.
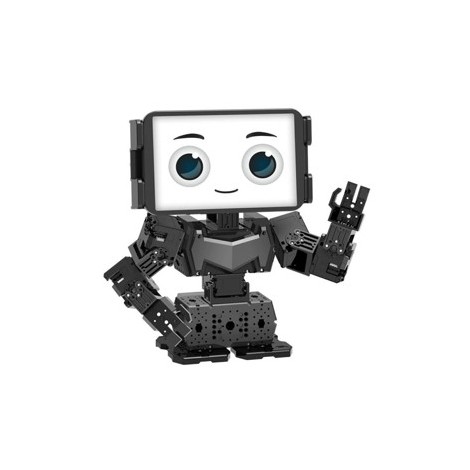
Robotis Kit: Your Gateway to Robotic Creativity
Robotis robotic kits offer enthusiasts and educators the opportunity to build and program their own humanoid robot. With a variety of components and modules, these kits allow exploring the basics of robotics and fostering creativity in hands-on learning.






































The Booster K1 is a humanoid robot designed for education, research, and interactive demonstration. It combines mobility, computing power, and ergonomics in a compact, ready-to-use format.


The Booster T1 is a lightweight, high-performance, open-source humanoid robot designed for developers and researchers, featuring a complete API, ROS2 compatibility, and advanced simulation and AI capabilities.


This new Robotis Engineer kit designed for higher education in robotics and programming comes equipped with Raspberry Pi V2 camera module and a Raspi Zero Board to develop your robotic vision skills.


The Robotis Engineer Kit 1 includes a set of robotics solutions for education, app development and competition. With this kit, you can create various articulated, smart robotics platforms.


Kit for Poppy Torso robot with Raspberry electronics (the 3D parts are not included in this set). The Torso version does not have legs, contrary to Poppy Humanoid version. Please note that this robotics set does not include any screen for Poppy’s eyes.


Kit for Poppy Torso robot with Raspberry electronics and 3D printed parts. The Torso version does not have legs, contrary to Poppy Humanoid version.

Kit for Poppy Humanoid robot with Raspberry electronics. This kit contains all the elements (Dynamixel actuators, electronics, connectors, ...) to assemble Poppy. The 3D parts are not included in this kit.


Kit for Poppy Humanoid robot with Raspberry electronics. This kit contains all the elements (Dynamixel actuators, electronics, connectors, ...) to assemble Poppy including 3D printed parts.


NAO6 in dark gray is the sixth generation of the interactive humanoid robot NAO, developed by SoftBank Robotics, and is autonomous and fully programmable. This robot is aimed at the professionals and academics.

Use these small Robotis Premium FP04-F10 structural components with your Robotis Premium Bioloid kit for perfect hardware compatibility.

A kit of 6 Robotis FP04-F7 structural components designed exclusively for your Bioloid kit.

A kit of 12 Robotis FP04-F6 structural components in engineering plastic for your Bioloid kit.

Designed for replacing or improving the parts in your Bioloid kit, these 4 Robotis FP04-F54 structural components are built to last!

Do you need replacement parts for your Bioloid chassis? The Robotis FP04-F53 structural components should help!

The Robotis FP04-F51/F52 structural components are part of the Bioloid kits powered by Dynamixel AX-series servos. They are made of extremely robust material.

These 6 Robotis FP04-F5 structural components fit the Bioloid robotics kits and are exclusively compatible with Dynamixel AX-series servos.

Say hello to the new educational humanoid OP robot by Robotis! The Robotis OP3 is more efficient, has an autonomous navigation system and offers a ROS suitable for Linux and Windows users.

FP04-F18 frame for Bioloid kit. Compatible only with the AX-series Dynamixel servomotors. Bolts an nuts are not included (see the accessories section).

FP04-F12 frame for Bioloid kit. Compatible only with the AX-series Dynamixel servomotors. Bolts an nuts are not included (see the accessories section). This part can be used as a wheel when connected to a AX-12A servomotor.

FP04-F12 frame for Bioloid kit. Compatible only with the AX-series Dynamixel servomotors. Bolts an nuts are not included (see the accessories section).

FP04-F11 frame for Bioloid kit. Compatible only with the AX-series Dynamixel servomotors. Bolts an nuts are not included (see the accessories section).

In addition to the S2 PHS M2x8 screws used to fix your Dynamixel AX servomotors, this set of plastic washers and bushings allows a solid fixing to the plastic structural parts of the Bioloid robotic kits.

The Lithium-Ion 3.7 V 1300 mAh LB-041 Battery is a rechargeable battery designed especially for your Robotis-Mini (*) robot and the OpenCM9.04 microcontroller.

An essential accessory for your DARwin-Mini robot’s Li-Ion LB-041 Battery, the LBB-041 Battery Charger is very easy to assemble and use. It is compatible with the previous LB-040 battery.