L’allevamento, un settore in cui la robotizzazione si rivela fondamentale
Nel settore dell’allevamento, la rimozione del letame è un compito che richiede molto tempo e fatica e che deve essere svolto necessariamente più volte al giorno.
Esistono diverse modalità per effettuare questa pulizia: idrocura, raschietti automatici (a catena, a cavo o a corda), trattori dotati da raschietti…
Questi metodi, utilizzati nella grande maggioranza degli allevamenti, sono vincolanti:
- Impiego di manodopera (per guidare il trattore, portare fuori gli animali)
- Sorveglianza e manutenzione (ri-tensionare le catene, le corde o i cavi)
- Struttura dell’edificio adeguata (pendenza dal 1,5% al 2% per l’idrocura, adattamento del pavimento per il passaggio della corda, del cavo o della catena)
In questo contesto, l’introduzione di un robot autonomo incaricato di pulire il letame assume un grande significato e presenta un vantaggio concreto per l’allevatore:
- Nessun intervento umano
- Nessuna necessità di modificare la struttura dell’edificio o di adattare ulteriori impianti
- L’allevatore può programmare la frequenza di pulizia (le aree più sporche saranno pulite più spesso)
- Maggiore facilità nella valorizzazione del letame (metanizzazione)
CRD: SPECIALISTI DI SOLUZIONI AUTOMATIZZATE PER L’ALLEVAMENTO
La società CRD (Concept Rolland Développement) è creatrice di soluzioni automatiche che permettono la pulizia, la gestione e la valorizzazione degli effluenti e dell’alimentazione negli allevamenti. Con 20 anni di esperienza, CRD ha già rifornito migliaia di impianti in Francia e all’estero, consolidando così la sua presenza a livello globale.

L’azienda dispone anche di un servizio di Ricerca e Sviluppo che studia, testa e sviluppa i sistemi del futuro. La produzione dei materiali CRD corrisponde a specifiche tecniche molto rigorose. I fornitori e i partner di CRD sono selezionati con estrema attenzione per l’affidabilità della loro produzione o dei loro servizi.
GÉNÉRATION ROBOTS: ESPERTI IN LOCALIZZAZIONE E MAPPATURA SIMULTANEE PER ROBOT AUTONOMI
Durante i suoi vari progetti, Génération Robots ha acquisito un’esperienza significativa in cartografia e localizzazione, sia su robot domestici dotati di semplici LiDAR 2D destinati a operare in ambienti statici, sia su robot più complessi che coinvolgono la mappatura in 3 dimensioni in ambienti esterni molto dinamici. L’obiettivo della società CRD era trasformare una delle sue macchine agricole in un robot mobile, capace di muoversi autonomamente in un ambiente complesso. Per questo progetto, si è naturalmente rivolta a Génération Robots. Gli ingegneri di Génération Robots hanno così dotato il robot di diversi sensori e sviluppato tutto il software di mappatura, localizzazione e navigazione. Grazie all’uso di diversi sistemi di localizzazione dalle proprietà complementari e a strategie di fusione dei dati adeguate, è stato possibile portare a termine con successo la missione del robot CRD in un ambiente molto difficile: pochi punti di riferimento visibili, numerosi bovini che ostruivano il campo visivo dei LiDAR, suolo molto scivoloso, numerose pendenze e parti dell’ambiente a volte mobili.
I ROBOT ASPI’CONCEPT: LA SOLUZIONE DELL’AZIENDA CRD
Con 20 anni di esperienza nella gestione e valorizzazione degli effluenti agricoli, il dipartimento Ricerca e Sviluppo dell’azienda CRD ha ideato e costruito il robot Aspi’Concept, un robot autonomo capace di aspirare o raschiare, garantendo così una pulizia ottimale del suolo.

Specifiche tecniche del robot mobile autonomo Aspi’Concept:
- Robot mobile in inox con potente pompa a vuoto (l’aspirazione di letame spesso è possibile)
- 2 ruote motrici e 1 pattino anteriore
- Peso a vuoto: 500 kg
- Guida laser con visione a 360 gradi
- Grande serbatoio per letame (350L) con scarico rapido
- Dotato di una lama raschiante in gomma larga 1,50 m con ruote alle estremità (migliore pulizia degli angoli)
- Autonomia: 12 ore
- Tempo di ricarica: 12 ore
- Possibilità di aggiungere un serbatoio d’acqua e ugelli (2L/min)
- Raschiamento su superficie piana o inclinata (fino al 8%)
- Si sposta su grigliato o pavimentazione solida (pompa per il letame disattivata su grigliato)
- Possibilità di intervento su più edifici (80-100 bovini)
- La configurazione dei percorsi, degli orari e delle frequenze di passaggio avviene tramite un tablet o un computer
Vantaggi del robot mobile Aspi’Concept:
Il robot Aspi’Concept :
- Garantisce una parte delle attività di pulizia faticose
- Riduce la necessità di manodopera
- Fa risparmiare tempo
- Funziona sia di giorno che di notte, all’interno e all’esterno
- Garantisce una migliore circolazione per gli animali e per i dipendenti
- Ne garantisce il benessere per gli animali e una maggiore igiene dell’ambiente
- Può essere utilizzato senza dover modificare l’architettura degli edifici
- Migliore convivialità tra il sistema di raschiamento e gli animali
Questo robot è sia una garanzia di redditività che un notevole risparmio di tempo durante le giornate lavorative.
PROBLEMATICA RISCONTRATA DA CRD E INTERVENTO DI GÉNÉRATION ROBOTS
Le difficoltà incontrate da questo robot che compromettono le sue prestazioni, sono di natura ambientale:
- Suolo scivoloso, con buche e pendenze
- Alta densità di bovini intorno al robot, che ostruisce il suo campo visivo
- Accumulo di sporco sui sensori nel tempo (deiezioni animali)
Questi molteplici fattori impediscono al robot di funzionare correttamente, in particolare per quanto riguarda il suo spostamento autonomo. Affinché quest’ultimo possa avvenire senza problemi, il robot deve essere in grado di:
- Mappare l’azienda agricola
- Localizzarsi sulla mappa
- Muoversi autonomamente seguendo percorsi predefiniti dall’utente
- Rilevare collisioni
- Rilevare slittamenti delle ruote
- Segnalare problemi tramite email e/o sms
- Fornire un’interfaccia web per l’utente
- Muoversi all’interno e all’esterno
- Eseguire un monitoraggio del marciapiede per pulire completamente i corridoi
- Gestire gli ostacoli
- Gestire lo stato di carica delle batterie
LA SOLUZIONE TROVATA
La progettazione iniziale del robot mobile Aspi’Concept prevedeva come sensori:
- 1 LiDAR, posizionato alla base del robot, utilizzato per consentire al robot di muoversi in modo autonomo seguendo le corsie
- 2 encoder, per raccogliere informazioni sulla direzione e sulla velocità di rotazione dei motori delle ruote
Problemi incontrati: la navigazione autonoma è resa difficile a causa dell’intasamento molto rapido del LiDAR posizionato nella parte inferiore. Inoltre, non ci sono punti di riferimento affidabili a questa altezza, che potrebbero essere utilizzati per l’auto-localizzazione. L’autonomia è limitata a causa delle difficoltà legate alla presenza delle corsie. Per risolvere i problemi di degrado della visione del robot, che ostacolano la sua navigazione autonoma (frequenti schizzi sul LiDAR), Génération Robots ha trovato la seguente soluzione: installazione di un secondo LiDAR, posizionato nella parte superiore del robot: Installazione di un secondo LiDAR, posizionato nella parte superiore del robot:
- Posizione più protetta dagli schizzi
- Posizione che permette di percepire in modo più affidabile i punti di riferimento dell’ambiente.
Per muoversi in modo autonomo facilmente, il nostro team ha utilizzato il metodo AMCL, applicato alla mappatura in tempo reale. Il metodo di localizzazione AMCL, combinato con l’algoritmo Hector SLAM, ha permesso di mappare in modo preciso e in tempo reale l’azienda agricola, sfruttando al massimo questi due algoritmi complementari. Le loro informazioni vengono fuse dinamicamente in base alle prestazioni. Il metodo AMCL prende il sopravvento quando l’ambiente è difficile da percepire o scarso di riferimenti. Hector SLAM, invece, consente di riposizionare in modo efficace e rapido il robot quando ci sono abbastanza punti di riferimento visibili. È stata aggiunta una una centrale inerziale (IMU), per aiutare il robot a percepire il suo ambiente (pendenze, canali) e i suoi movimenti (rotazione, slittamento, spostamento). Si tratta di un sensore essenziale per un robot mobile che si sposta autonomamente, soprattutto in un ambiente con animali e ostacoli che possono influire sulla velocità del robot (canali, pozzanghere scivolose, griglie di drenaggio, pendenze…).
INSTALLAZIONE DI SENSORI AL ROBOT STANDARD
Gli ingegneri di Génération Robots hanno aggiunto un secondo LiDAR e sostituito il primo. Hanno scelto il RPLidar S1 del progettista SLAMTEC. Vantaggi del RPLidar S1 per questo tipo di applicazione:
- Lunga portata (40 m)
- Utilizzabile all’interno e all’esterno
- Compatibilità con ROS
- Ottimo rapporto qualità-prezzo

Il sensore IMU scelto è il sensore UM7 di Redshift Labs, che i nostri ingegneri avevano già avuto modo di testare su altri progetti. Questo sensore è fondamentale per una buona navigazione autonoma. Vantaggi dell’unità inerziale UM7 per questo tipo di applicazione:
- Facilità di installazione
- Compatibilità con ROS
- Ottimo rapporto qualità-prezzo

Per conoscere la posizione del robot in tempo reale, i suoi spostamenti e la topografia del suo ambiente, abbiamo fuso i dati provenienti da questi sensori.
IL METODO MONTE-CARLO APPLICATO ALLO SLAM
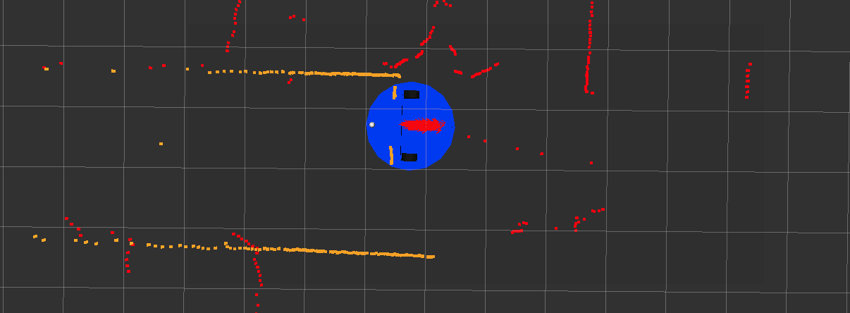
Ogni LiDAR mappa in tempo reale il suo ambiente, quindi il robot ha a disposizione 2 mappe per scegliere il percorso migliore da seguire per spostarsi. In un ambiente affollato da numerosi animali che si muovono costantemente, è un vantaggio per il robot. Il nostro team ha migliorato l’algoritmo di localizzazione 2D Hector SLAM utilizzando il metodo Monte-Carlo, una tecnica algoritmica che applica tecniche probabilistiche. Questo metodo, chiamato AMCL, consente di introdurre un approccio statistico nella mappatura in tempo reale.
I FILTRI A PARTICELLE PER L’AUTO-LOCALIZZAZIONE DEL ROBOT
Nel caso di questo robot mobile per l’allevamento, l’algoritmo assegna una distribuzione di probabilità a ciascuna mappa, così come alle soluzioni di movimento. Abbiamo così creato un sistema di punteggio basato sulle probabilità di movimenti ottimizzati calcolati sulle due mappe (LiDAR 1 e LiDAR 2). Il paragrafo qui sotto spiega il funzionamento di questo metodo in modo più dettagliato: L’auto-localizzazione del robot avviene grazie a un filtro a particelle, dove ogni particella rappresenta una posizione possibile del robot. Il robot analizza il suo ambiente grazie ai suoi sensori e assegna un punteggio di probabilità a ciascuna particella. Maggiore è la probabilità dell’esattezza della posizione del robot, più alto è il punteggio. I punteggi più bassi vengono quindi eliminati e l’algoritmo calcola la media dei migliori punteggi per ottenere la posizione attuale del robot. I risultati ottenuti con questo metodo sono estremamente precisi, anche con il robot in movimento.
Convergenza delle particelle del nodo AMCL per determinare la posizione del robot
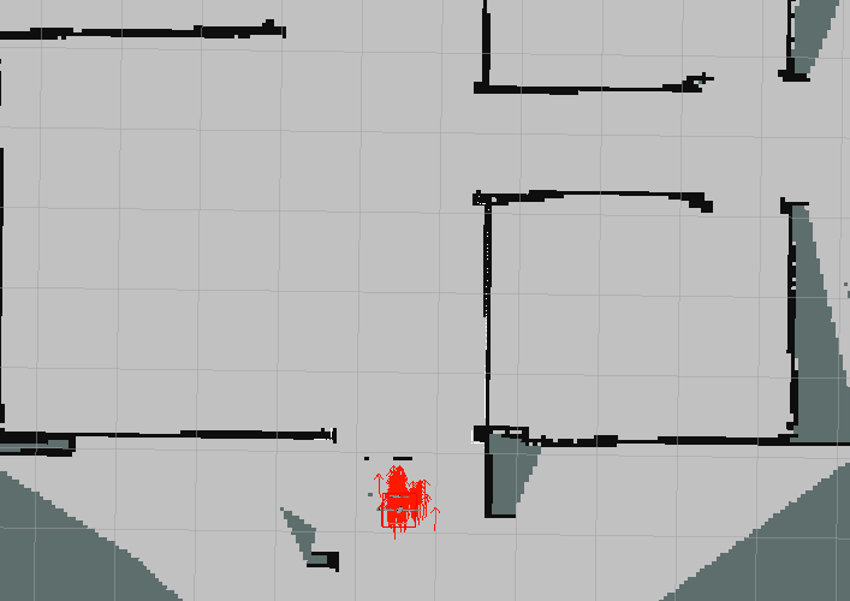
Convergenza delle particelle del nodo AMCL per determinare la posizione del robot
L’INTERFACCIA DI PROGRAMMAZIONE E CONFIGURAZIONE
Il nostro team ha sviluppato un’interfaccia Qt che consente all’utente di programmare e configurare il robot mobile Aspi’Concept:
- Interfaccia accessibile tramite un browser web
- Creazione di traiettorie
- Creazione di mappe
- Pianificazione delle operazioni di pulizia
- Memorizzazione di configurazioni e modelli
- Configurazione del robot
- Ricezione di messaggi di errore, notifiche e avvisi
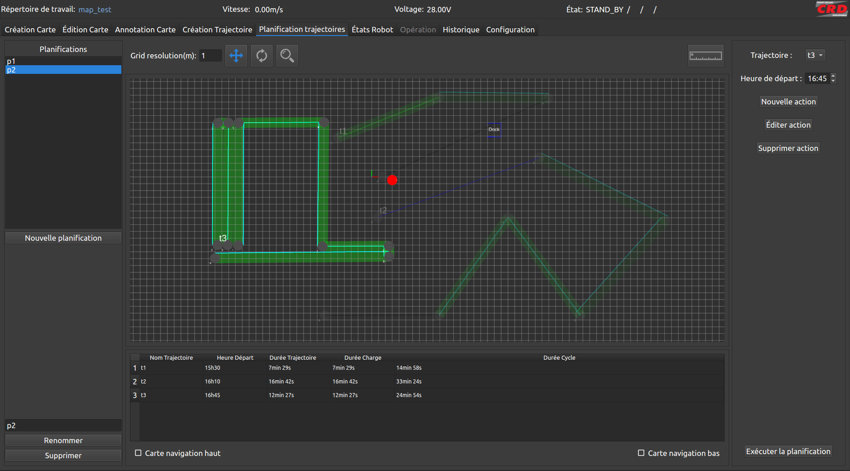
Interfaccia di controllo del robot autonomo Aspi’Concept
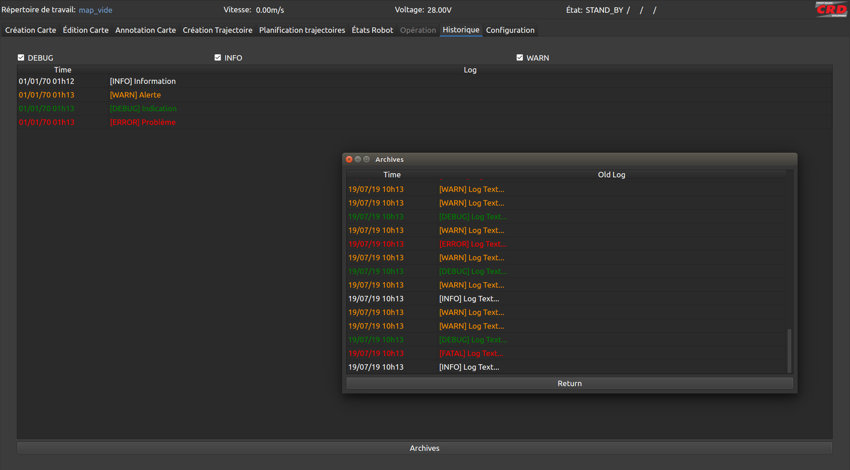
Interfaccia di controllo del robot autonomo Aspi’Concept
RISULTATI DI QUESTO PROGETTO SLAM PER ROBOT MOBILE UTILIZZATO IN UN SITO AGRICOLO
Il software sviluppato da Génération Robots ha accelerato l’installazione del robot nei siti agricoli da parte di CRD. Ad oggi, sono state costruite 20 unità che sono già funzionanti. Génération Robots ha fornito a CRD una formazione completa sull’uso del robot (utilizzo del robot, comprensione del software, manutenzione, ecc.). Ad oggi, 200 robot Aspi’Concept sono stati distribuiti in Francia (agosto 2024).