Gli operatori dell’industria automobilistica discutono spesso tra loro delle sfide e delle opportunità legate alla creazione di un’azienda specializzata in veicoli autonomi.
Curiosamente, però, si parla poco dell’architettura di questi veicoli. Il produttore americano di LiDAR, Ouster, ha approfondito l’argomento con l’obiettivo di progettare LiDAR pensati specificamente per questi mezzi.
I diversi livelli di autonomia dei veicoli
La Society of Automotive Engineers (SAE), associazione che riunisce 138.000 esperti e ingegneri dell’industria automobilistica e aerospaziale, ha sviluppato una scala a 5 livelli per classificare il grado di autonomia dell’AI a bordo delle auto autonome.
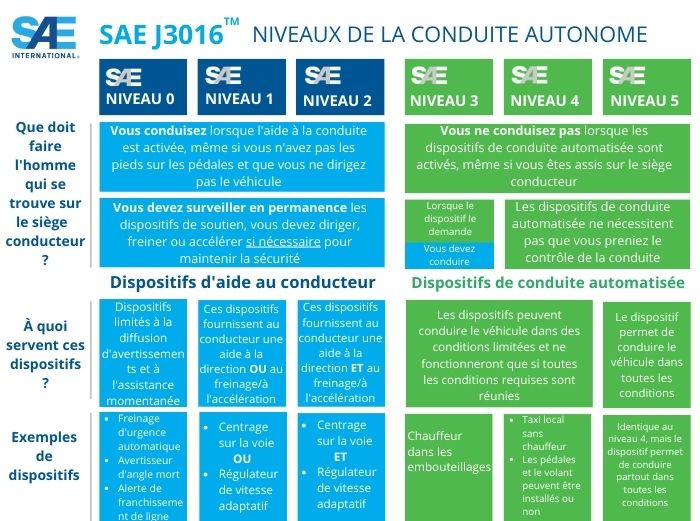
Oggi i veicoli in commercio raggiungono il livello 2 di automazione (detto anche “2+”) e si basano su un insieme di sensori composti da telecamere, radar frontali e LiDAR a bassa risoluzione. Dietro questo insieme di sensori si trova uno stack di elaborazione piuttosto basilare.
Per poter raggiungere i livelli 4 e 5 dello standard SAE, l’industria deve superare alcune sfide tecniche fondamentali:
- Percezione e localizzazione accurate in qualsiasi tipo di ambiente
- Processo decisionale più rapido in tempo reale in una varietà di condizioni
- Sistemi affidabili ed economici che possano essere commercializzati in grandi quantità
Per risolvere queste problematiche, sarebbe necessario uno stack hardware dotato di sensori ad alta potenza e un’infrastruttura informatica più veloce.
I diversi sensori di un veicolo autonomo
1) LiDARIl LiDAR è utilizzato su tutti i prototipi di veicoli di livello 4 o 5, grazie alla sua capacità di fornire informazioni precise sulla profondità e sull’ambiente circostante. Questi dati, rappresentati da una 3D point cloud (nuvola di punti in 3D), integrano le informazioni fornite da telecamere e radar, permettendo di classificare gli oggetti intorno al veicolo in modo più rapido e accurato.
Vantaggi
- Informazioni molto precise sulla profondità (portata)
- Funziona sia di giorno che di notte, indipendentemente dall’illuminazione e dalle condizioni esterne
- Risoluzione media (molto più alta rispetto al radar, ma inferiore rispetto alla telecamera)
Svantaggi
- Elevata quantità di dati da elaborare
- Costo elevato
- Dimensioni maggiori rispetto ad altri sensori

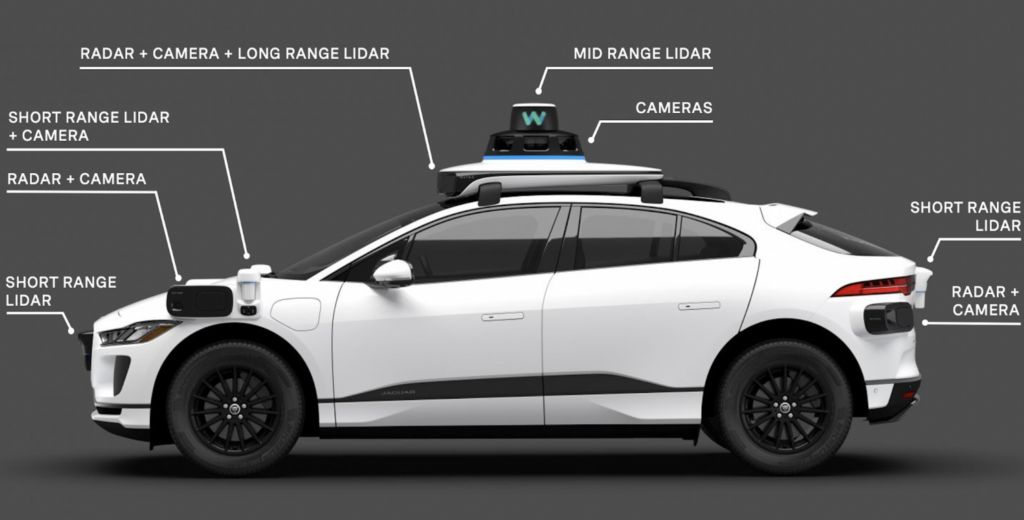
Un veicolo autonomo standard è dotato di LiDAR a corta, media e lunga portata, posizionati in diversi punti del veicolo.
Integrazione
- 4 LiDAR a corta portata , installati sui bordi del veicolo, vengono utilizzati per identificare potenziali rischi nelle immediate vicinanze del veicolo (come piccoli animali, paletti o cordoli) che il conducente potrebbe non notare. Questa configurazione prevede un sensore sulla calandra del veicolo, due sensori vicino agli specchietti laterali e un sensore sul portellone posteriore del veicolo.
- 2 LiDAR a media portata , posizionati obliquamente sui bordi del tetto, vengono utilizzati per la mappatura e la localizzazione.
- 2 LiDAR a lunga portata, montati sul tetto del veicolo, servono per rilevare oggetti scuri e potenziali ostacoli davanti al veicolo quando viaggia ad alta velocità. Questi sensori sono generalmente due e possono ruotare a 360° o direzionati verso la parte anteriore.
2) Telecamera
Le telecamere rappresentano il nucleo tradizionale dello stack di percezione di un veicolo autonomo. I veicoli di livello 4 o 5 sono dotati di oltre 20 telecamere posizionate intorno al veicolo, le quali vengono poi allineate e calibrate per creare una visione a 360° dell’ambiente circostante, in altissima definizione.
Vantaggi
- Alta risoluzione e colori in un sistema 2D
- Economico
- Facili da integrare (possono essere quasi nascoste all’interno del veicolo)
- Percezione visiva simile a quella umana
Svantaggi
- Sensibili alle variazioni di luminosità e alle condizioni meteo avverse
- La visione a 360° richiede un’elevata potenza di calcolo per l’elaborazione e l’assemblaggio delle immagini
3) Radar
Negli ultimi 15 anni, i radar sono diventati di uso comune nelle applicazioni automobilistiche. Il radar utilizza onde radio per generare nuvole di punti 3D dell’ambiente circostante.
Vantaggi
- Informazioni sulla profondità degli oggetti e dell’ambiente
- Economico
- Robusto
- Resistente alle condizioni meteorologiche avverse (pioggia, neve)
- Ampia portata
Svantaggi
- Bassa risoluzione
- Possibili falsi negativi con oggetti fermi e ostacoli critici
Integrazione
- Nei veicoli autonomi di livello 4 e 5, il radar è posizionato a 360° attorno al veicolo e funge da unità affidabile per la rilevazione degli oggetti.
- Fino a ~10 radar installati su specchietti laterali, calandra, paraurti posteriore o angoli del veicolo.
Questi tre sensori hanno ciascuno i propri vantaggi e svantaggi. Tuttavia, se combinati, costituiscono un sistema di sensori molto robusto, che consente una guida autonoma di livello 4 e 5.
Considerando il numero di sensori presenti su questi veicoli, le esigenze di elaborazione sono enormi. Esaminiamo ora le diverse strategie per affrontare questa sfida.
I diversi processori di un veicolo autonomo
Esistono due approcci principali per elaborare la grande quantità di dati generata dall’insieme dei sensori: il trattamento centralizzato e il trattamento distribuito (o Edge Computing).
1)Trattamento centralizzato
Con il trattamento centralizzato, tutti i dati grezzi provenienti dai sensori vengono inviati e processati da un’unica unità centrale di elaborazione.
Vantaggi: I sensori sono piccoli, economici e a basso consumo energetico.
Svantaggi
- Richiede chipset costosi con elevata potenza e velocità di elaborazione.
- Latenza potenzialmente elevata nelle applicazioni, poiché l’aggiunta di nuovi sensori implica richieste di elaborazione aggiuntive.
2) Edge Computing
Con l’Edge Computing, solo le informazioni rilevanti di ogni sensore vengono inviate all’unità centrale, dove vengono combinate e utilizzate per l’analisi o la presa di decisioni.
Vantaggi:
- Minore utilizzo della banda
- Interfaccia più economica tra i sensori e la CPU
- Minore latenza delle applicazioni, ridotta necessità di potenza di elaborazione. L’aggiunta di nuovi sensori non aumenta drasticamente le esigenze di performance.
Svantaggi: Esigenze maggiori in materia di sicurezza funzionale
Alcuni CPU particolarmente adatti all’Edge Computing sono, ad esempio, NVIDIA Jetson Orin.
L’Edge Computing sta diventando la tecnologia di riferimento per i veicoli autonomi, poiché consente di elaborare simultaneamente e in tempo reale un numero crescente di segnali provenienti da sensori ad alta intensità di dati.
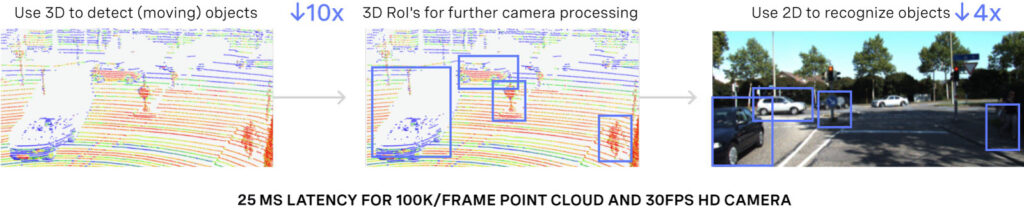
Per dimostrare i vantaggi di questo approccio, Ouster ha utilizzato il software Teraki per fondere i dati di un LiDAR Ouster e di una telecamera HD.
Il software Teraki, una soluzione efficiente per l’elaborazione dei dati
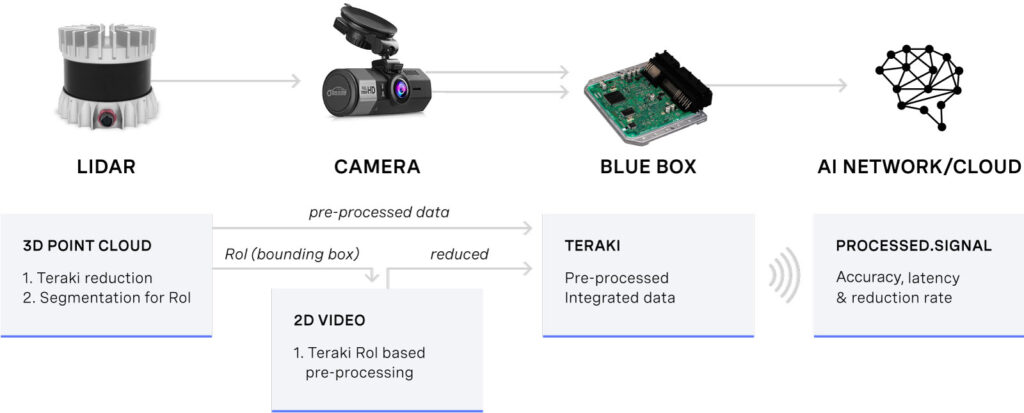
Il LiDAR Ouster genera dati ad alta risoluzione in forma di nuvola di punti, mappando l’ambiente intorno al sensore. L’elevata densità di informazioni prodotta dal LiDAR (fino a 250 Mbps per i sensori a 128 canali) rende troppo complessa l’elaborazione in tempo reale per l’hardware del veicolo.
La combinazione di questi dati con i calcoli complessi necessari per l’elaborazione video, fondamentali per prendere decisioni corrette e immediate, rappresenta un’importante sfida per le applicazioni di guida autonoma.
Il software Teraki permette di risolvere questo problema grazie a una selezione intelligente delle informazioni provenienti dai sensori. Il software rileva e identifica le aree di interesse all’interno della nuvola di punti 3D generata da Ouster, le comprime e trasmette solo le informazioni rilevanti al computer di bordo. L’area di interesse rilevata viene poi trasmessa alla telecamera e sovrapposta ai dati video.
Conclusione
L’utilizzo di questo software e dell’Edge Computing consente di migliorare i nostri algoritmi di mappatura, localizzazione e percezione. Ciò significa veicoli più sicuri che prendono decisioni migliori, quasi in tempo reale. Un nuovo passo avanti verso i veicoli autonomi di livello 4 e 5.
Una prova dell’efficacia di questo tipo di software? I taxi robot sono apparsi di recente sulle strade di San Francisco. Tra entusiasmo e polemiche, l’introduzione di questi veicoli segna un progresso significativo nel campo del trasporto autonomo.