Consultez les autres articles de notre série “Technologie LiDAR”
 |
Définition – Qu’est-ce qu’un LiDAR ?
Un LiDAR est un composant électronique qui fait partie de la famille des capteurs. Plus précisément, il fait partie de la catégorie des capteurs de temps de vol (ToF).
Un capteur recueille des données sur un paramètre physique tel que la température, l’humidité, la lumière, le poids, la distance, etc.
L’acronyme LiDAR signifie Light Detection And Ranging. Il s’agit d’une méthode de calcul qui permet de déterminer la distance entre le capteur et l’obstacle visé. Un LiDAR utilise un faisceau laser pour la détection, l’analyse et le suivi.

Phénomène physique – Son fonctionnement ?
La technologie LiDAR est une technologie de télédétection qui mesure la distance entre le capteur et une cible. La lumière est émise par le LiDAR et se dirige vers sa cible. Elle est réfléchie sur sa surface et revient à sa source. Comme la vitesse de la lumière est une valeur constante, le LiDAR est capable de calculer la distance le séparant de la cible.
Distance = (vitesse de la lumière x durée de vol) / 2
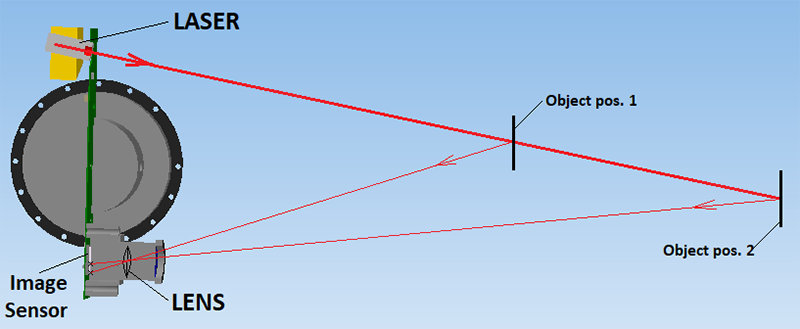
En connaissant la position et l’orientation du capteur, la coordonnée XYZ de la surface réfléchissante peut être calculée, représentée par un point.
En répétant ce processus à plusieurs reprises, l’instrument établit une « carte » complexe composée de tous les points que le LiDAR a recueillis.
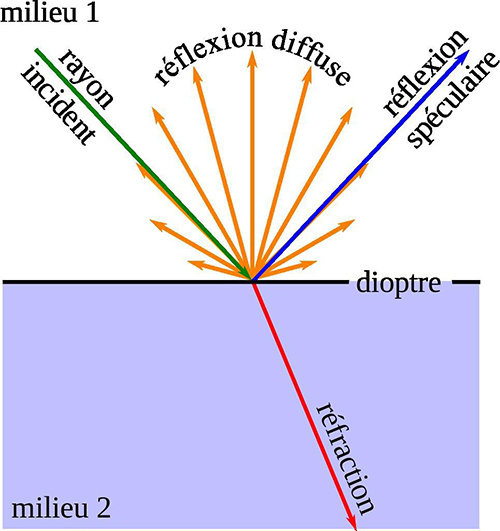
Le diagramme suivant explique comment une onde se réfracte sur une surface. Une partie de l’onde est réfléchie suivant le même angle d’incidence (réflexion spéculaire), une autre partie est réfractée à travers la surface et la dernière partie est réfléchie de manière diffuse suivant différents angles d’incidence.
Aperçu des caractéristiques du LiDAR
Technologie de balayage
Cette technologie de télédétection peut être utilisée pour mesurer la distance entre l’instrument de mesure et un obstacle, dans ce cas, on parle de télémètre laser. Si le capteur effectue un balayage pour obtenir les distances entre le capteur et les obstacles environnants, on parle alors de LiDAR.
Le LiDAR tourne et mesure la distance des obstacles sur une plage angulaire allant jusqu’à 360°, soit un cercle complet. Sa vitesse de rotation dépend de la fréquence de balayage qui est comprise entre 1 Hz et 100 Hz.
Les différents systèmes de vision du LiDAR
Il existe trois types de LiDAR : 1D, 2D ou 3D. Ils fonctionnent de la même manière, la différence réside dans le nombre de dimensions exploitées.
Pour un télémètre laser 1D, nous avons besoin d’un unique faisceau laser fixe qui mesure la distance entre deux points, la donnée obtenue est sur un axe et donc une dimension.
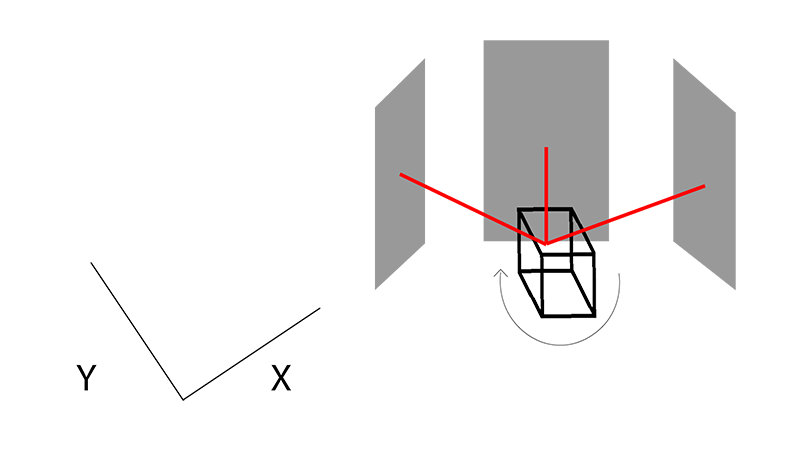
Pour un LiDAR 2D, un seul faisceau laser est nécessaire. En effet, il pulse suivant un mouvement de rotation sur le plan horizontal et calcule la distance des obstacles, nous obtenons des données sur les axes X et Y.
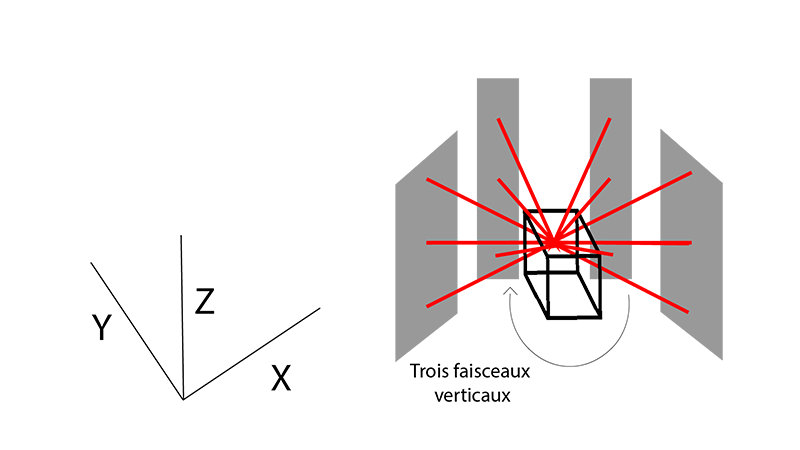
Pour un LiDAR 3D, l’idée est la même, mais il y a plusieurs faisceaux laser répartis sur l’axe vertical, toujours avec ce balayage circulaire horizontal. Nous obtenons des données selon trois axes X, Y et Z. Chaque faisceau laser aura un angle de différence delta avec les autres faisceaux sur le plan vertical.
Longueur d’onde
La longueur d’onde du laser est un paramètre important du LiDAR. En effet, la lumière solaire reçue à la surface de la Terre est répartie sur un large spectre de longueurs d’onde :
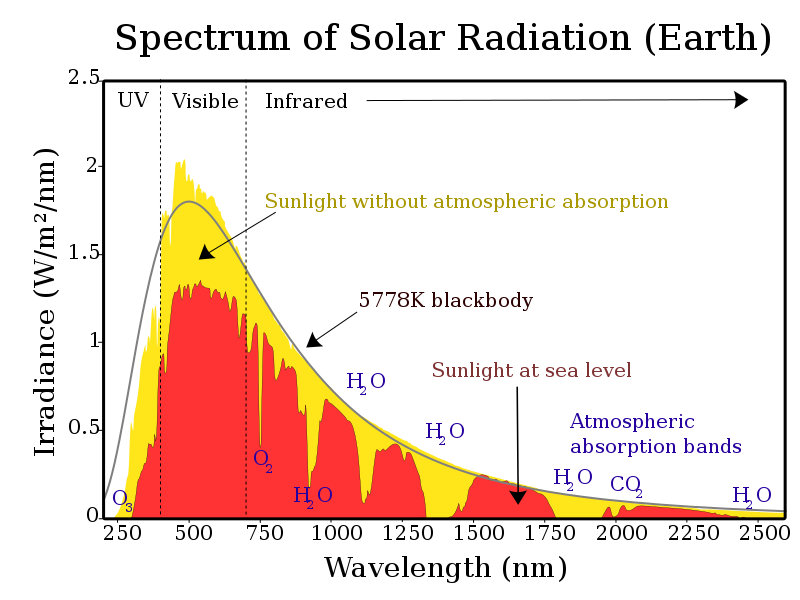
Sur ce graphique, certains creux sortent du lot :
- 750 nm
- 940 nm
- 1125 nm
- 1400 nm
Des faisceaux laser plus puissants que le niveau 1 peuvent être nocifs pour l’œil humain et endommager la rétine.
Les LiDARs utilisent les longueurs d’onde suivantes :
- Infrarouge (1500 -2000 nm) pour la météorologie/Doppler LiDAR – Applications scientifiques
- Dans le proche infrarouge (850 -940 nm) pour la cartographie terrestre
- Bleu-rouge (500 -750 nm) pour la bathymétrie
- Ultraviolet (250 nm) pour la météorologie
Intérieur/Extérieur
Tous les LiDARs conformes à ces normes technologiques peuvent être utilisés à l’intérieur. Seuls quelques-uns d’entre eux peuvent être utilisées à l’extérieur en fonction de leurs caractéristiques. Les facteurs suivants doivent être pris en compte :
- La longueur d’onde : à 500 nm, la lumière du soleil produit le plus haut niveau de perturbation
- La résistance à la lumière ambiante (en Lux) : paramètre qui indique la quantité de lumière qu’il peut accepter pour fonctionner correctement.
- Le type de surface : surface transparente, fumée, brouillard, etc.
- La capacité de résistance au bruit ambiant : pluie, neige, relief, etc.
- La plage de température : température acceptée pour un bon fonctionnement du LiDAR
- Considérations électromagnétiques : perturbations physiques pouvant modifier le comportement du capteur
Les LiDARs extérieurs sont plus chers en raison de leurs performances supérieures.
Distance
La portée des LiDARs varie entre 0,01m à 200m. Selon l’environnement, le LiDAR sera exposé à la lumière artificielle, la lumière du soleil, du relief, des éléments transparents, etc. Il faut choisir un LiDAR avec une distance appropriée. En effet, en usage intérieur, une distance de détection allant jusqu’à 100m n’a pas forcément beaucoup d’intérêt.
Erreur
L’ensemble des LiDARs ont deux types d’erreurs dans leur mesure :
L’erreur systématique : ce type d’erreur déplace toutes les mesures de façon systématique et prévisible. Les erreurs systématiques ne peuvent pas être éliminées, mais leur influence peut être minimisée.
L’erreur aléatoire : des erreurs supplémentaires, dues à l’environnement et aux paramètres physiques (réfractions, diffraction, etc.), peuvent également survenir. Une erreur aléatoire se produit lorsque les mêmes mesures exactes effectuées par le LiDAR affichent des valeurs différentes.
L’erreur totale sur la distance varie de ±10mm à ±200mm en fonction des LiDARs.
Alimentation électrique
Tous les LiDARs ont besoin d’une d’alimentation électrique. En fonction de la tension attendue et le courant consommé par les composants, la consommation d’énergie ou la puissance consommée, peut être calculée. En utilisant une batterie, ce paramètre a une réelle importance, en effet, un LiDAR qui consomme beaucoup d’énergie va raccourcir le cycle de la batterie du robot.
Performances
Plage angulaire
Cette spécification technique indique la plage de rotation possible du LiDAR.
Par exemple : un LiDAR avec une plage angulaire de 360° peut effectuer une rotation complète (un cercle complet) pendant son fonctionnement. Si ce paramètre est inférieur à 360°, le LiDAR ne mesurera qu’une partie de son environnement, il aura une zone d’ombre à chaque cycle de balayage.
Pour un robot mobile, il est important de cartographier tout son environnement, par conséquent un LiDAR qui a une plage angulaire 360° sera un réel atout.
Nombre de positions : le pas
Ce paramètre indique le nombre de positions auxquelles le LiDAR effectue une mesure sur un cycle de balayage.
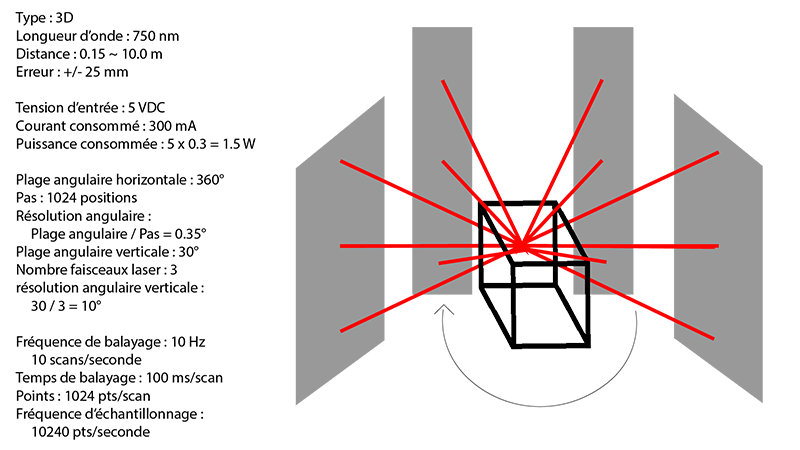
Par exemple : un LiDAR avec 1024 pas et une plage angulaire de 360° fera une mesure pour tous les Plage angulairePas= 360°1024 = 0,35°.
Si le nombre de pas est trop petit, le robot n’aura pas assez de points pour prendre une décision en tout sécurité.
Résolution Angulaire
La résolution angulaire est le résultat du calcul précédent (0,35°), elle indique la précision du LiDAR sur sa plage de rotation. Dans cet exemple, nous aurons un point tous les 0,35°. Par conséquent plus ce nombre est petit, plus la qualité de la ‘carte’ générée sera élevée. Vous devriez choisir ce paramètre, tout en sachant la précision nécessaire de l’environnement généré pour que le robot puisse s’y déplacer en sécurité.
Fréquence de balayage
Ce paramètre linéaire indique la vitesse de rotation du moteur du LiDAR. En effet, la fréquence de balayage indique combien de rotations le LiDAR est capable de faire en 1 seconde.
| Fréquence de balayage | Vitesse angulaire | Vitesse de rotation |
| 1 Hz | 360°/seconde | 60 rpm (tr/min) |
Par exemple : un LiDAR qui a une fréquence de balayage de 10 Hz et une plage angulaire de 360° fera 10 rotations complètes par seconde.
Le choix de ce paramètre est essentiel lorsque votre robot se déplace rapidement dans son environnement ou lorsque l’environnement se déplace rapidement autour du robot. En effet, personne n’aime prendre une décision tout en manquant d’informations.
Temps de balayage
Ce paramètre est : Temps de balayage = 1Fréquence de balayage = x seconde/scan.
Points
C’est le nombre de points mesurés. Pour un LiDAR avec un faisceau laser, le nombre de point par scan est égal au nombre de pas.
Par exemple : 1024 points/scan signifie qu’un LiDAR avec un faisceau laser aura 1024 points ou échantillons dans un cycle de balayage.
Fréquence d’échantillonnage
C’est le nombre de points détectés pendant une seconde.
Par exemple : un LiDAR avec une plage angulaire de 360°, 1024 pas et une fréquence de balayage de 10Hz, la fréquence d’échantillonnage est de1024*10=10240 points/seconde.
Vous pouvez améliorer l’un des deux paramètres (le pas ou la fréquence de balayage) pour augmenter la quantité de données reçues en une seconde.
Interface de communication
L’interface, le contrôleur et le protocole de communication qui seront utilisés avec le LiDAR doivent pouvoir suivre la mesure du débit de données (I2C, PWM, SPI, série, etc.), afin de ne perdre aucune information.
Un élément essentiel, est d’avoir la même vitesse de transmission de donnée (baud rate) entre le LiDAR et le PC ou la carte embarquée. Si cette vitesse est trop faible, le comportement ne correspondra pas à celui attendu.
ROS
Le Robot Operating System (ROS) est un ensemble de bibliothèques logicielles et d’outils conçus pour aider à la création d’applications robotiques. Des pilotes aux algorithmes de pointe, en passant par les puissants outils de développement, ROS est maintenant un standard de l’industrie pour tout projet robotique. C’est une solution open-source.
Les LiDARs présentés sur le site de Génération Robots sont tous compatibles ROS. N’hésitez pas à consulter notre sélection de LiDARs ou à nous contacter, si vous avez besoin de plus amples informations sur cette technologie.
Conclusion – avantages et inconvénients du LiDAR
Avantages du LiDAR
- Les données peuvent être collectées rapidement et avec une grande précision
- Le LiDAR peut facilement être intégré avec d’autres capteurs : sonar, caméra, IMU, GPS, capteurs ToF
- La technologie LiDAR peut être utilisée à la lumière du jour ou dans l’obscurité, grâce à un capteur d’éclairage actif
- Peut être utilisé pour collecter des données sur les endroits inaccessibles à l’homme
- Les LiDAR sont rapides et très précis. C’est un excellent outil pour recueillir des données sur de vastes étendues de terre
- Une fois correctement configuré, un LiDAR est une technologie autonome et peut fonctionner tout seul.
Inconvénients du LiDAR
- Le LiDAR peut être coûteux selon les spécifications requises par votre projet
- Les LiDAR sont inefficaces en cas de fortes pluies, de nuages bas, de brouillard ou de fumée, ou encore en présence d’obstacles transparents
- L’analyse de l’énorme quantité de données recueillies peut prendre du temps et des ressources
- Les puissants faisceaux laser utilisés dans certains LiDAR peuvent endommager l’œil humain
- Il est difficile de pénétrer la matière très dense
Consultez les autres articles de notre série “Technologie LiDAR”
|
Consultez notre section LiDAR pour la recherche et le supérieur ou contactez-nous pour avoir plus d’informations ou obtenir un devis.
Les marques de LiDAR distribuées par Génération Robots
 | ||