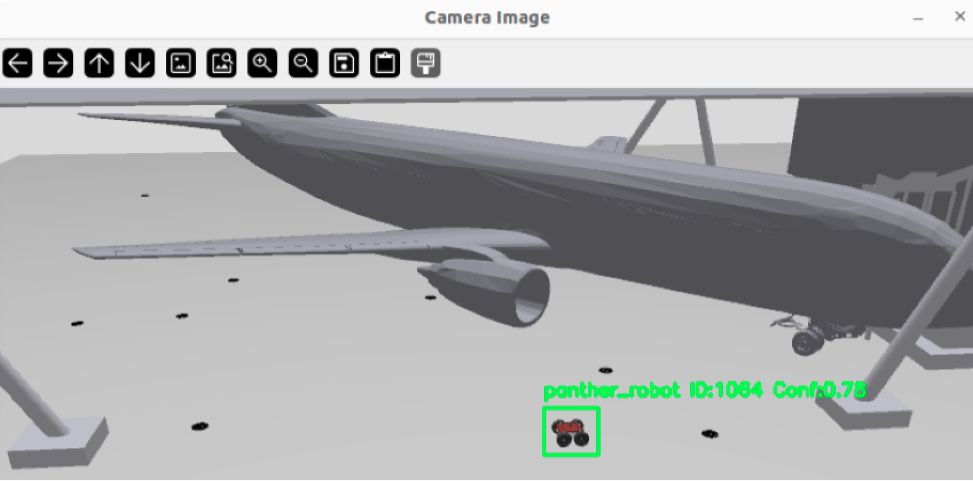
A robotics student at Cranfield University came up with the idea of using several external cameras to capture images of the Panther robot in the hangar. These images are then processed using the YOLOv8 deep learning model, which detects objects in real time and calculates pixel coordinates that are transformed into real positions in space.
To refine location accuracy, data from external cameras, IMUs and odometers is merged using sensor fusion techniques, in particular the Extended Kalman Filter (EKF).
Another localization method is the use of Ultra-Wideband (UWB) technology to improve the location accuracy of the Panther robot’s navigation. A robotics student has integrated UWB beacons into the robot, combined with traditional sensors such as LIDARs, IMUs and odometers. Thanks to sensor fusion via EKF, this configuration achieves centimetre-level accuracy, even in cluttered indoor environments.
UWB technology works by sending low-power radio pulses over a wide frequency band. Thanks to its distance detection and time-of-flight (ToF) calculation capabilities, it offers centimetre-level accuracy and is resistant to interference in complex environments such as hangars.
The project showed significant improvements in location accuracy thanks to the integration of UWB. Initial tests have revealed a 30% improvement in location accuracy compared with using the SLAM Toolbox alone. The next steps include real-life tests in hangars and extending sensor capabilities for even more precise navigation with the integration of 3D cameras and a 3D LIDAR.
“The Panther robot is the ideal platform for our learning needs. It allows students to work with a real robot, test sensors in a variety of environments and learn practical skills in a real-world setting.”
The Bioversity & CIAT Alliance is using Husarion’s Panther mobile robot to map soil organic carbon as part of the Carbon Sequestration Project, funded by the Bezos Earth Fund. The aim is to improve tropical soils’ capacity to store carbon by developing new varieties of plants, such as forage grasses and rice, with enhanced carbon assimilation through photosynthesis and deeper rooting.
Agriculture accounts for around 10% of global CO₂ emissions, but it can also play a key role in capturing carbon via photosynthesis. By improving the capacity of soils to store carbon, it is possible to slow the increase in the concentration of CO₂ in the atmosphere and thus mitigate climate change.
To assess the effectiveness of new plant varieties and measure carbon storage, the Bioversity & CIAT Alliance is using a soil mapping approach based on two main technologies:
Panther serves as a mobile platform for these sensors. It is equipped with GPS, an advanced communication system (Wi-Fi, 4G LTE) and ROS-based open-source software, making it easy to integrate and deploy in the field. Thanks to its robust design, with all-terrain wheels and an IP66 protection rating, it can navigate in difficult agricultural environments while minimising the impact on crops thanks to its moderate weight.
Using Panther enables researchers to accurately map soil carbon, optimise CO₂ sequestration strategies and help farmers make informed decisions for more sustainable agriculture. The project is part of a wider vision to reduce soil erosion, improve soil fertility and combat climate change.
The Bioversity & CIAT Alliance is exploring how robotics and digital technologies can transform agriculture and help preserve the environment.
The Bioversity & CIAT Alliance is exploring how robotics and digital technologies can transform agriculture and help preserve the environment.
Australia, home of the macadamia nut, is facing a major challenge: significant losses during harvesting. To solve this problem, RMIT University decided to use the Husarion Panther robotic platform to recover lost nuts and improve harvesting efficiency.
Australia, which has an 18-20% market share of macadamia nuts, has seen its position as world leader supplanted by South Africa. The loss of nuts during harvesting stands out as a major problem among the reasons for this decline. Uneven terrain and the inability of traditional equipment to access certain areas make harvesting difficult, resulting in a loss of up to 10% of nuts lost each year. This innovative project aims to solve this problem and enable Australia to regain its place on the world market.
“We chose Panther because of Husarion’s reputation. We were introduced to Husarion in 2019 with the ROSbot, which we used for teaching in our AI and Robotics Innovation Lab at RMIT. We were impressed by the quality of the Husarion’s platforms as well as the responsiveness of their team who support us with both software and hardware.”
 Visit our shop
Visit our shop