Der Thymio ist ein kleiner Lernroboter, mit dem Kinder die Welt der Robotik kennen lernen und die Sprache der Roboter erlernen können.
Aufgrund seiner evolutiven Programmierung eignet er sich für eine breite Altersstufe. Dieser Artikel erklärt die Unterschiede zwischen den drei Programmierarten: VPL, Blockly, Text (und erfahren Sie mehr über Scratch für Thymio).
Wollen Sie auch schon junge Menschen in die Welt des programmierens entführen?
 |
 |
 |
Es gibt drei Arten der Programmierung für den Roboter Thymio. Jede hat ihre besonderen Merkmale, doch alle benötigen nur eine Software, die hier zum Download zur Verfügung steht: https://www.thymio.org/fr:start
Aber was sind die Unterschiede zwischen den dreien?
Visual Programming Language (VPL)
Es handelt sich um die leichteste Form der Programmierung.
Mithilfe einer Schnittstelle, die eigens für die Jüngsten unter den Benutzern konzipiert wurde, kann der Roboter sehr schnell gesteuert werden. Dabei werden einfach Bildsymbole aneinander gereiht, um aufgrund der gewählten Sensoren Aktionen auszulösen.
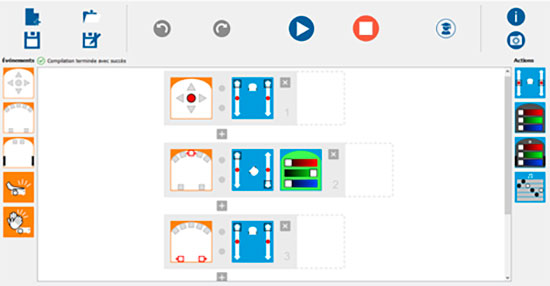
Um das Programm auf dem Roboter Thymio zu speichern, genügt es, den grünen Pfeil („Play“) zu betätigen, der das Programm zum Roboter schickt. Und schon ist der Thymio in der Lage, sich fortzubewegen, Licht und Töne von sich zu geben oder Hindernissen auszuweichen!
Diese Art von Programmierung ist ideal für Grund- und Mittelschüler.
Programmierung mit Blöcken (Blockly)
Diese Art der Programmierung ist der erste Schritt auf dem Weg zur Textprogrammierung, denn hier werden Bedingungen und je nach den verwendeten Sensoren Schleifen erzeugt und die Aktoren des Roboters Thymio aktiviert.
Hier ist etwas mehr Logik bei der Funktionsweise erforderlich als bei der vorigen Programmierart.
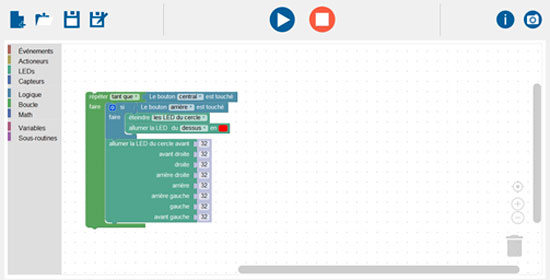
Diese Art von Programmierung wurde für Mittelschüler entwickelt.
Textprogrammierung
Die Programmierung in Textform wird bei der Programmierung zahlreicher Roboter eingesetzt.
Wird sie einmal beherrscht, so wird die Programmierung auf Anhieb schneller und leistungsfähiger. Hiermit können Funktionen schneller gestartet werden – es genügt, die gewünschte Aktion anzuklicken.
Diese Oberfläche bietet auch fortschrittliche Funktionen wie die Anzeige der Messwerte der Sensoren des Roboters. Diese können herangezogen werden, um das Verhalten des Roboters besser anzupassen.
Die Textprogrammierung übernimmt die Logik der Programmierung mit Blöcken. Ein Beispiel: Soll der Thymio einer Linie ausweichen, so muss eine Bedingung für die Sensoren generiert werden. Dann erst werden die Servomotoren aktiviert.
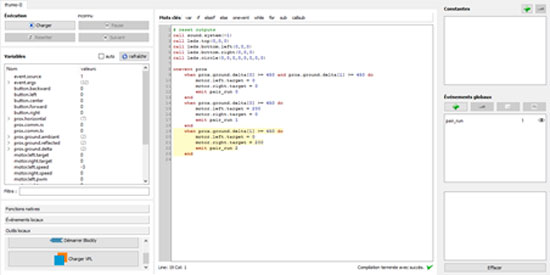
Diese Benutzeroberfläche ist noch einigermaßen leicht verständlich, denn alle Funktionen zur Programmierung des Roboters sind in der Software vorgespeichert. Es genügt also, die richtigen Parameter auszuwählen, um Ihren Roboter intelligenter zu machen.
Diese Art von Programmierung zielt auf Schüler der Oberstufe bzw. Studenten ab.
Kompatibilität zwischen Thymio und Scratch
Die lange erwartete Softwareanbindung Asebascratch bietet Scratch-Programmen und ihren Helferlein die Möglichkeit, eine Interaktivität zwischen dem Roboter Thymio II oder Wireless Thymio herzustellen. So können Sie Ihren Roboter Thymio als Zwerg in einer Scratch-Szene einbauen.
Scratch für Thymio: installieren leicht gemacht
- Herunterladen Sie und Installieren Sie die Aseba Studio Software-Bundle
- Herunterladen Sie und Installieren Sie die Scratch 2 Editor Software
- Herunterladen Sie und Installieren Sie die Scratch2-ThymioII Link
- Ihr Roboter Thymio muss mit dem Computer verbunden sein (WiFi oder USB)
- Starten Sie “Scratch2 – Thymio II” um das Hilfsprogramm zu starten
- Öffnen Sie eines der Beispielprogramme von Scratch 2 (Thymio-II.sb2)