
Schwierigkeitsgrad der Übung “Entfernungsberechnung mit dem Roboter Thymio”
- 1.-3. Klasse
- 4.-6. Klasse
Lernkonzepte bei der Übung “Thymio für die 1.-6. Klasse”
- Rechnen mit ganzen Zahlen
- Benchmarks zur Beobachtung des Fortschritts
- Erkennung und Verwendung einiger geometrischer Beziehungen
- Räumliche Orientierung und Fortbewegung unter Einsatz bzw. Erarbeitung von Darstellungen
Bezeichnung der Übung
Die Schüler bilden 2-er Gruppen und verwenden einen Roboter Thymio zum Anfertigen einer Zeichnung. Jede Linienführung muss von den Schülern mithilfe der Timer-Funktion der Software Aseba VPL programmiert werden.
Timer/Wecker – abgelaufener Timer

Wecker – abgelaufener Timer
Dieses Ereignis findet statt, falls ein gesetzter Timer auf Null abgelaufen ist.

Timer
Diese Aktion startet einen Timer zwischen 0 und 4 Sekunden. Der Timer wird gestellt, indem in die Uhr geklickt wird. Sobald der Timer abgelaufen ist, wird ein Wecker Ereignis ausgelöst.
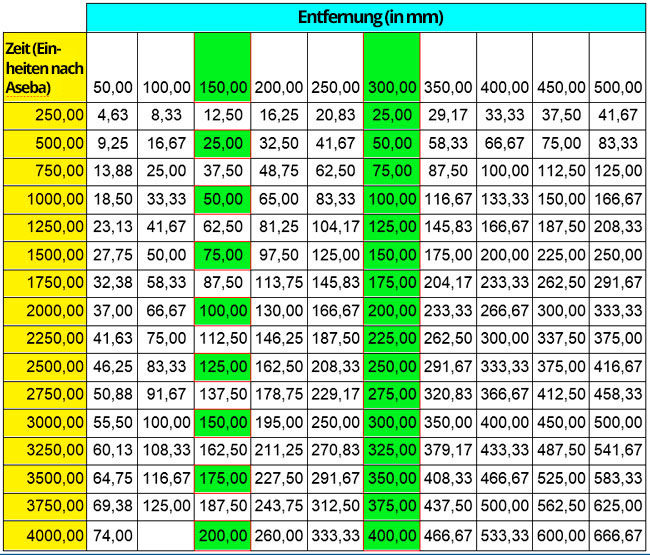
Wenn der Countdown bei Null angekommen ist, wird ein Ereignis “Timer abgelaufen” ausgelöst. Mithilfe von Timer und Timer abgelaufen kann mit einfachen Berechnungen die Variable Zeit zur Bestimmung einer Entfernung genutzt werden. Dadurch bewegt sich der Thymio entlang der verschiedenen Bezugspunkte, um die Zeichnung auszuführen.
Die nachstehende Tabelle der Entsprechungen hilft Ihnen bei Ihren Berechnungen.
Für diese Übung haben wir die Zeichnung einer Burg gewählt. Natürlich können Sie mit Ihrem Thymio auch eine andere Zeichnung anfertigen! Die einzige Einschränkung dabei ist, dass sich am besten eine Form eignet, die ausgeführt werden kann, ohne den Bleistift absetzen zu müssen.
Anweisungen
- Wählen Sie eine Zeichnung mit einfacher Form.
- Messen Sie anschließend die Seitenlängen Ihrer Zeichnung. Damit können Sie mithilfe der Tabelle der Entsprechungen die ungefähre Geschwindigkeit und Zeit für jeden Strich bestimmen.
- Generieren Sie jetzt Ihre Programmierblöcke unter Einsatz der Timer-Funktion für die Zeit und der Status-Funktion zum Zählen der Statusschritte. Achtung, nur 16 Statusschritte sind in der grafischen Programmiersprache (mit VPL) möglich. Um das genaue Modell der Burg nachzuzeichnen, sind mehr Schritte notwendig, denn die Linienführung wurde unter Aseba Studio programmiert.
Die Status-Funktion

Zustand
Diese Aktion stellt den 4-bit internen Zustand des Roboters ein. Grau bedeutet, dass der bestehende Wert beibehalten wird, Weiss, dass dieser auf 0 und Orange, dass dieser auf 1 geändert wird.
Code der Linienführung für die Burg durch den Roboter Thymio (Auflösung)
Wenn Sie keinen Roboter Thymio besitzen..
Der Roboter (Thymio II bzw. Wireless Thymio) wird unter dem nachstehendem Link auf unserer Website angeboten: