
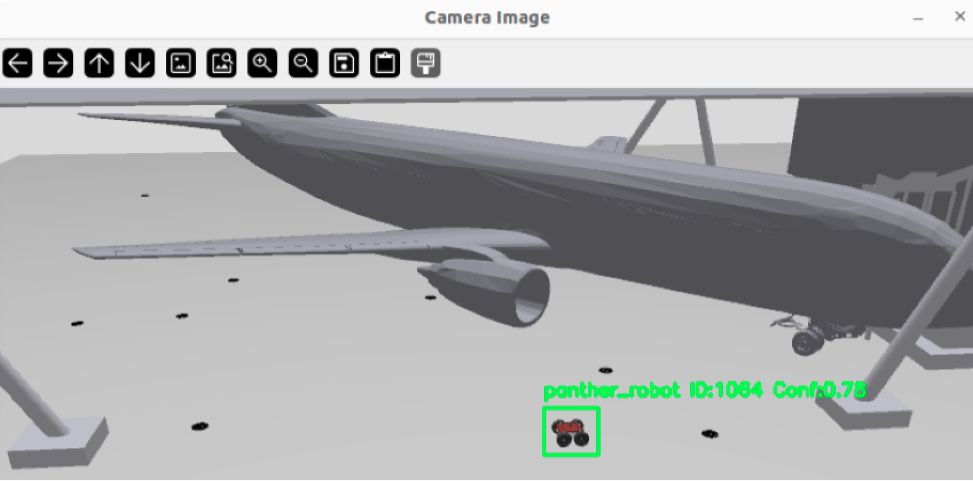
Im Umfeld eines Hangars wird die Roboternavigation durch das Fehlen markanter Merkmale, wechselnde Beleuchtung und reflektierende Oberflächen, die die Sensoren beeinträchtigen, erschwert. Herkömmliche Ortungsmethoden wie GPS funktionieren nicht, während IMUs und Entfernungsmesser Abweichungen und Ungenauigkeiten aufweisen.

Eine Studentin der Robotik an der Cranfield University hatte die Idee, Bilder des Panther-Roboters im Hangar mit Hilfe mehrerer externer Kameras zu erfassen. Diese Bilder werden dann mit dem Deep-Learning-Modell YOLOv8 verarbeitet. Dadurch können Objekte in Echtzeit erkannt und Pixelkoordinaten berechnet werden, die in effektive räumliche Positionen umgewandelt werden.
Um die Genauigkeit der Standortbestimmung zu optimieren, werden die Daten von externen Kameras, IMUs und Odometern mithilfe von Sensorfusionstechniken, einschließlich des Erweiterten Kalman-Filters (EKF), zusammengeführt.
Eine weitere Methode zur Standortbestimmung ist die Verwendung der Ultra-Wideband-Technologie (UWB), um die Navigationsgenauigkeit des Panther-Roboters zu verbessern. Ein Robotikstudent baute UWB-Beacons in den Roboter ein, die mit herkömmlichen Sensoren wie LIDAR, IMUs und Odometern kombiniert wurden. Durch die Fusion von Sensoren über EKF ermöglicht diese Konfiguration selbst in überfüllten Innenräumen eine Genauigkeit im Zentimeterbereich.
Die UWB-Technologie funktioniert durch das Aussenden von Funkimpulsen mit geringer Leistung über ein breites Frequenzband. Mit ihrer Fähigkeit, Entfernungen zu erkennen und die Flugzeit (ToF) zu berechnen, ermöglicht sie eine Genauigkeit im Zentimeterbereich und ist in komplexen Umgebungen wie Hangars störungsresistent.
Das Projekt zeigte deutliche Verbesserungen der Ortungsgenauigkeit durch die Integration von UWB. Erste Tests zeigten eine 30 % ige Verbesserung der Ortungsgenauigkeit im Vergleich zur alleinigen Verwendung der SLAM Toolbox. Zu den nächsten Schritten gehören Tests unter realen Bedingungen in Hangars und die Erweiterung der Sensorkapazitäten für eine noch genauere Navigation durch die Integration von 3D-Kameras und einem 3D-LIDAR.
DieBioversity & CIAT Alliance verwendet den mobilen Panther-Roboter von Husarion zur Kartierung des organischen Kohlenstoffs im Boden im Rahmen des Carbon Sequestration Project, einem vom Bezos Earth Fund finanzierten Projekt. Ziel ist es, die Fähigkeit tropischer Böden zur Kohlenstoffspeicherung zu verbessern, indem neue Pflanzensorten wie Futtergräser und Reis entwickelt werden, die über eine verstärkte Kohlenstoffaufnahme durch Photosynthese und tiefere Wurzeln verfügen.

Die Landwirtschaft ist für etwa 10% der weltweiten CO₂-Emissionen verantwortlich, kann aber auch eine Schlüsselrolle bei der Bindung von Kohlenstoff über die Photosynthese spielen. Durch die Verbesserung der Fähigkeit der Böden, Kohlenstoff zu speichern, ist es möglich, den Anstieg der CO₂-Konzentration in der Atmosphäre zu verlangsamen und so den Klimawandel abzuschwächen.
Um die Wirksamkeit neuer Pflanzensorten zu bewerten und die Kohlenstoffspeicherung zu messen, verwendet die Bioversity Alliance & CIAT einen Ansatz zur Bodenkartierung, der auf zwei Haupttechnologien basiert:

Durch den Einsatz des Panther können Forscher den Kohlenstoff im Boden genau kartieren, Strategien zur CO₂-Sequestrierung optimieren und Landwirten dabei helfen, fundierte Entscheidungen für eine nachhaltigere Landwirtschaft zu treffen. Das Projekt ist Teil einer umfassenderen Vision zur Verringerung der Bodenerosion, zur Verbesserung der Bodenfruchtbarkeit und zur Bekämpfung des Klimawandels.
Die Bioversity & CIAT Alliance untersucht somit, wie Robotik und digitale Technologien die Landwirtschaft verändern und zum Erhalt Schutz der Umwelt beitragen können.
Australien, die Wiege der Macadamianüsse, steht wegen hoher Ernteverluste vor einer großen Herausforderung. Daher beschloss die RMIT University, die Roboterplattform Husarion Panther einzusetzen, um verlorene Nüsse zu bergen und die Effizienz der Ernte zu verbessern.
Australien, das bei Macadamianüssen einen Marktanteil von 18-20% hat, wurde von Südafrika aus seiner weltweiten Führungsposition verdrängt. Einer der Hauptgründe für diesen Rückgang sind die Ernteverluste. Unwegbares Gelände und die Unmöglichkeit, mit herkömmlichen Geräten in bestimmte Gebiete vorzudringen, erschweren die Ernte, so dass jedes Jahr bis zu 10 % der Nüsse verloren gehen. Dieses innovative Projekt soll das Problem lösen, damit Australien seinen Platz auf dem Weltmarkt zurückerobert.

Der Panther-Roboter von Husarion ist mit modernster Technologie ausgestattet, um die Herausforderungen bei der Ernte von Macadamianüssen zu meistern. Mithilfe eines 3D-LIDAR und einer Zed2i-Kamera, in Verbindung mit einem Roboterarm kann der Panther selbst in schwierigem Gelände auf den Boden gefallene Nüsse orten und ernten.
