
Niveau de cet exercice « Calcul de distance avec le robot Thymio »
- Cycle 2 (du CP au CE2)
- Cycle 3 (du CM1 à la sixième)
Concepts abordés par l’exercice « Thymio pour les cycles 2 et 3 »
- Calculer avec des nombres entiers
- Repères de progressivité
- Reconnaitre et utiliser quelques relations géométriques
- Se) repérer et (se) déplacer dans l’espace en utilisant ou en élaborant des représentations
Intitulé de l’exercice
Les élèves se mettent par groupes de 2 et vont utiliser un robot Thymio pour faire un dessin. Le traçage de chaque ligne devra être programmé par les élèves en utilisant la fonction Timer du logiciel Aseba VPL.
La fonction Timer/Timer écoulé

Timer écoulé
Cet événement se déclenche lorsque le compte à rebours arrive à zéro.

Timer
Cette action permet de démarrer un compte à rebours de 0 à 4 secondes, défini par l’utilisateur en cliquant sur l’horloge. Lorsque le compte à rebours arrive à zéro, un événement « Timer écoulé » est déclenché.
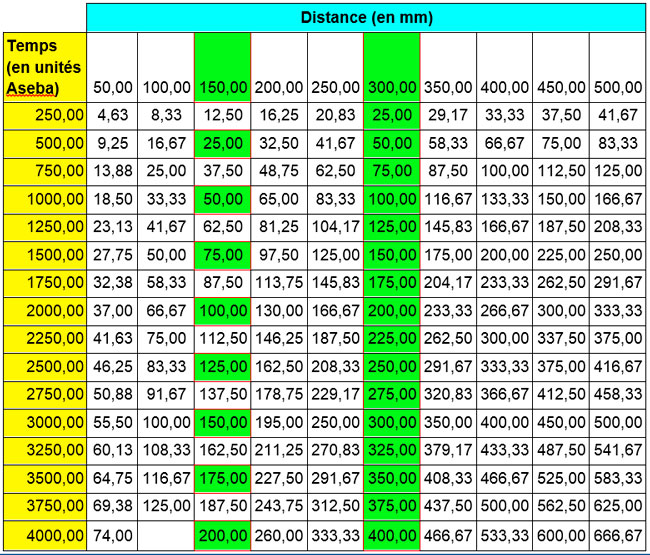
Grâce à Timer et Timer écoulé, il sera possible par de simples calculs d’utiliser la variable Temps afin de déterminer une Distance et de faire avancer le Thymio sur les différents points de repère, afin de compléter le dessin.
Le tableau de correspondance ci-dessous vous aidera dans vos calculs.
Pour cet exercice, nous avons choisi de dessiner un château fort, mais libre à vous de partir sur un autre dessin avec votre Thymio ! Seule restriction : il est préférable d’avoir une forme qui peut se faire sans avoir à lever le crayon.
Instructions
- Choisir un dessin de forme simple.
- Prenez ensuite les mesures des côtés de votre dessin. Vous pouvez ensuite déterminer approximativement les vitesses et les temps pour chaque trait grâce au tableau de correspondance.
- Créez ensuite vos blocs de programmation en utilisant la fonction Timer pour les temps, et la fonction Etat pour compter les états. Attention, seuls 16 états (= étapes) sont possibles en programmation graphique (avec le VPL). Il en faut plus pour faire le modèle exact du château, dont nous avons programmé le tracé dans Aseba Studio.
La fonction Etat

Fonction Etat
Cette action règle l’état à 4 bit du robot. Gris signifie laisser la valeur actuelle; blanc signifie mettre l’état à 0; jaune signifie mettre l’état à 1.
Code du tracé du château par le robot Thymio (correction)
Si vous n’avez pas de robot Thymio
Vous pouvez les trouvez sur notre site web à l’unité (Thymio II et Wireless Thymio) ci-dessous :