L’élevage, une activité où la robotisation prend tout son sens
Dans le secteur de l’élevage, le raclage du lisier est une tâche chronophage et fatigante, mais dont la réalisation (plusieurs fois par jour) est indispensable. Il existe différentes manières de procéder à ce nettoyage : hydrocurage, racleurs automatiques (à chaîne, à câble ou à corde), tracteur équipé d’une raclette… Ces méthodes, utilisées dans la grande majorité des élevages, sont contraignantes :- Immobilisation de main d’œuvre (pour conduire le tracteur, faire sortir les animaux)
- Surveillance et maintenance (retendre les chaînes, les cordes ou les câbles)
- Architecture du bâtiment adaptée (pente de 1,5% à 2% pour l’hydrocurage, aménagement du sol pour le passage de la corde, du câble ou de la chaîne)
- Pas d’intervention humaine
- Pas besoin de modifier la structure du bâtiment ou d’aménager des installations supplémentaires
- L’éleveur peut programmer la fréquence de nettoyage (les zones les plus salies seront nettoyées plus souvent)
- Valorisation du lisier plus facile (méthanisation)
CRD : SPÉCIALISTES DE SOLUTIONS AUTOMATISÉES POUR L’ÉLEVAGE
La société CRD (Concept Rolland Développement) est créatrice de solutions automatiques permettant le nettoyage, la gestion et la valorisation des effluents et l’affouragement dans les élevages. Forte de 20 ans d’expérience, CRD a déjà équipé plusieurs milliers de sites en France et à l’étranger. Implantation de l’entreprise CRD dans le monde
GÉNÉRATION ROBOTS : EXPERTS EN LOCALISATION ET CARTOGRAPHIE SIMULTANÉES POUR ROBOT AUTONOME
Au cours de ses différents projets, Génération Robots a pu acquérir une expertise forte en cartographie et localisation, aussi bien sur des robots domestiques équipés de simples LIDAR 2D et destinés à évoluer dans un environnement plat et statique, que pour des robots plus complexes impliquant de la cartographie en 3 dimensions dans des environnements extérieurs très dynamiques. L’objectif de la société CRD était de transformer l’une de ses machines agricoles en robot mobile, capable d’évoluer en milieu exigeant de manière autonome. Elle s’est donc naturellement tournée vers Génération Robots pour ce projet. Les ingénieurs de Génération Robots ont ainsi instrumenté le robot avec différents capteurs et ont développé tout le logiciel de cartographie, localisation et navigation. Grâce à l’utilisation de différents systèmes de localisation aux propriétés complémentaires ainsi qu’à des stratégies de fusion de données adaptées, il a été possible de remplir avec succès la mission du robot de CRD dans un environnement très difficile : peu de points de repère visibles, nombreux bovins obstruant le champ de vision des LiDAR, sol très glissant, nombreuses pentes et parties de l’environnement parfois mobiles.LE ROBOT ASPI’CONCEPT : LA SOLUTION DE L’ENTREPRISE CRD
Fort de ses 20 ans d’expérience dans la gestion et la valorisation des effluents agricoles, le pôle R&D de l’entreprise CRD a imaginé et construit le robot Aspi’Concept, un robot autonome capable d’aspirer ou de racler, assurant ainsi un nettoyage du sol optimal.
Spécifications techniques du robot mobile autonome Aspi’Concept :
- Robot mobile en inox embarquant une puissante pompe à vide (aspiration de lisier épais possible)
- 2 roues motrices et 1 patin à l’avant
- Poids à vide : 500kg
- Guidage laser avec une vision sur 360s degrés
- Grand réservoir de lisier (350L) avec vidange rapide
- Equipé d’une lame de raclage en caoutchouc de 1,50 m de large avec roulettes aux extrémités (meilleur nettoyage des angles)
- Autonomie : 12h
- Temps de charge : 12h
- Possibilité d’ajouter un réservoir d’eau et des buses (2L/min)
- Raclage sur du plat ou une pente (jusqu’à 8% )
- Navigation sur sol plein ou caillebotis (pompage du lisier inactivé sur ce dernier)
- Possibilité d’intervention sur plusieurs bâtiments (80 à 100 vaches)
- Le paramétrage des trajets, des horaires et fréquences de passage s’effectue depuis une tablette ou un ordinateur
Avantages du robot mobile Aspi’Concept :
Le robot Aspi’Concept :- Assure une partie des tâches de nettoyage fatigantes
- Réduit les besoins en main d’œuvre
- Vous fait gagner du temps
- Fonctionne de jour comme de nuit, en intérieur et en extérieur
- Assure un meilleur confort de circulation aux bêtes et aux employés
- Assure un meilleur bien-être aux animaux et une meilleure hygiène de leur environnement
- S’utilise sans qu’il y ait besoin de modifier l’architecture des bâtiments
- Meilleur convivialité entre le système de raclage et les animaux
PROBLÉMATIQUE RENCONTRÉE PAR CRD ET INTERVENTION DE GÉNÉRATION ROBOTS
Les difficultés rencontrées par ce robot, et qui nuisent à ses performances, sont d’ordre environnemental :- Sol glissant, avec des trous et des pentes
- Forte densité de vaches autour du robot, lui obstruant son champ de vision
- Encrassement des capteurs dans le temps (déjections animales)
- Cartographier l’exploitation agricole
- Se localiser sur la carte
- Naviguer de façon autonome en suivant des trajectoires prédéfinies par l’utilisateur
- Détecter des collisions
- Détecter des glissements de roue
- Signaler des problèmes par email et/ou sms
- Fournir une interface web pour l’utilisateur
- Naviguer en intérieur et en extérieur
- Effectuer un suivi de trottoir pour nettoyer intégralement les couloirs
- Gérer les obstacles
- Gérer l’état de charge des batteries
LA SOLUTION MISE EN PLACE
Le design initial du robot mobile Aspi’Concept prévoyait comme capteurs :- 1 LiDAR, placé à la base du robot, utilisé pour que le robot se déplace de manière autonome en suivant les trottoirs
- 2 encodeurs, pour collecter des informations sur le sens et vitesse de rotation des moteurs des roues
- Emplacement davantage à l’abri des éclaboussures
- Emplacement permettant de percevoir de manière plus fiable les points de repères de l’environnement.
AJOUT DE CAPTEURS À L’ÉQUIPEMENT DE BASE
Les ingénieurs de Génération Robots ont ajouté un deuxième LiDAR et remplacé le premier. Ils ont choisi le RPLidar S1 du constructeur SLAMTEC. Avantages du RPLidar S1 pour ce type d’application :- Longue portée (40m)
- Utilisation à l’intérieur comme à l’extérieur
- Compatibilité ROS
- Excellent rapport qualité-prix
Télémètre laser 360° RPLidar S1

- Facilité de mise en place
- Compatibilité ROS
- Excellent rapport qualité-prix

LA MÉTHODE MONTE-CARLO APPLIQUÉE AU SLAM
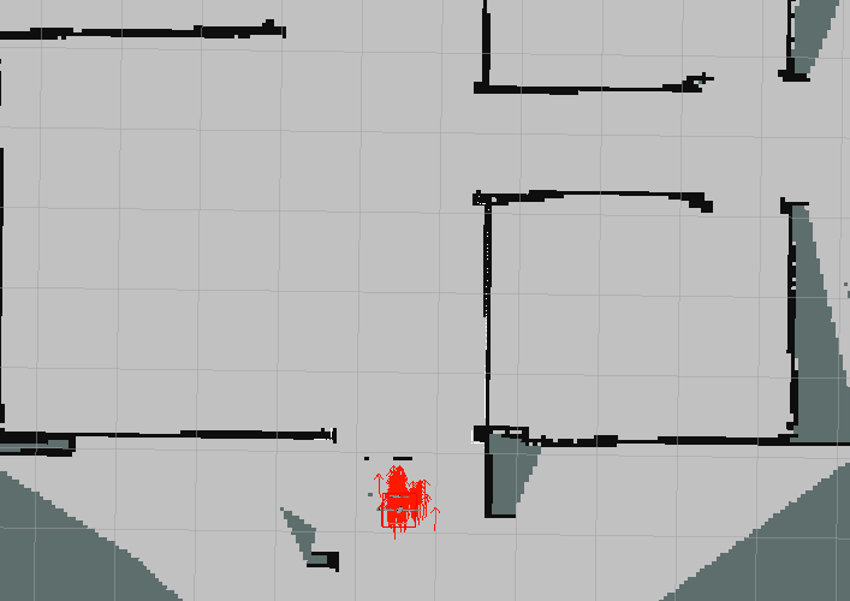
Chaque LiDAR cartographie en temps réel son environnement, le robot a donc 2 cartes à sa disposition pour choisir le meilleur chemin à suivre pour se déplacer. Dans un environnement encombré par de nombreuses vaches qui se déplacent constamment, c’est un atout pour le robot. Notre équipe a amélioré l’algorithme de localisation 2D Hector SLAM en utilisant la méthode Monte-Carlo, une méthode algorithmique qui applique des techniques probabilistes. Cette méthode baptisé AMCL permet d’introduire une approche statistique dans la cartographie en temps réel.LES FILTRES À PARTICULES POUR L’AUTO-LOCALISATION DU ROBOT
Dans le cas de ce robot mobile pour l’élevage, l’algorithme affecte une distribution de probabilité à chaque carte, ainsi qu’à leurs solutions de déplacement. Nous avons ainsi créé un système de score basé sur les probabilités de déplacements optimisés calculés sur les deux cartes (LiDAR 1 et LiDAR 2). Le paragraphe ci-dessous explique le fonctionnement de cette méthode plus en détails : L’auto-localisation du robot se fait grâce à un filtre à particules, où chaque particule représente une position possible du robot. Le robot analyse son environnement grâce à ses capteurs, et donne un score de probabilité à chaque particule. Plus la probabilité de l’exactitude de l’emplacement du robot est haute, plus le score est élevé. Les scores les plus faibles sont alors éliminés et l’algorithme calcule la moyenne des meilleurs scores pour obtenir la position actuelle du robot. Les résultats obtenus avec cette méthode sont incroyablement précis, même avec le robot en mouvement.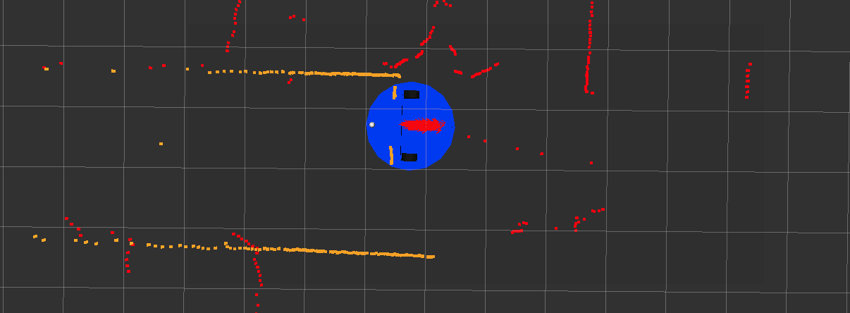
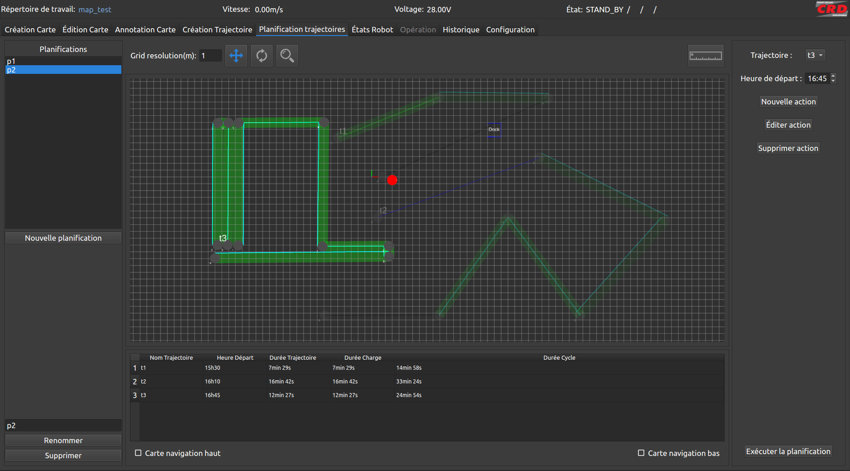
L’INTERFACE DE PROGRAMMATION ET DE CONFIGURATION
Notre équipe a développé une interface Qt permettant à l’utilisateur de programmer et configurer le robot mobile Aspi’Concept :- Interface accessible depuis un navigateur web
- Création de trajectoires
- Création de cartes
- Planification de sessions de nettoyage
- Mémorisation de configurations et de modèles
- Configuration du robot
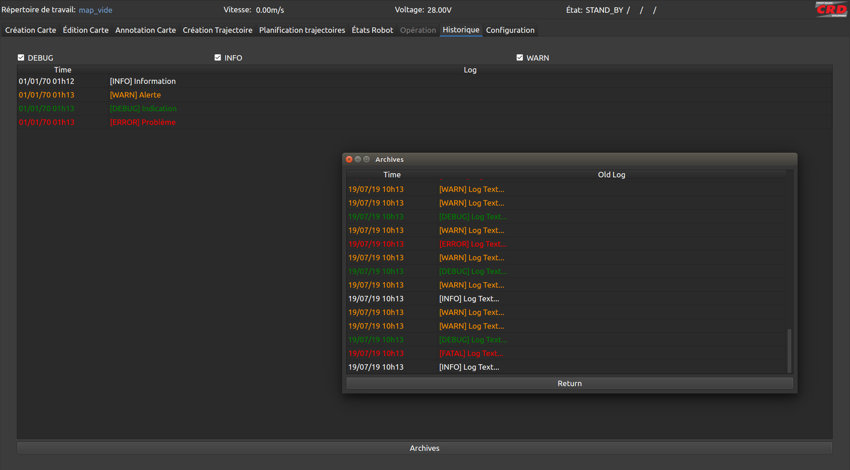
- Réception de messages d’erreur, de notifications, d’alertes