
Présentation du Robotis OP3
Dernier robot humanoïde de la série Darwin développée par le constructeur coréen ROBOTIS , le robot humanoïde Robotis OP3 embarque le PC Intel NUC. L’OS étant par défaut Linux, il peut aussi accepter Windows, que ce soit 32 ou 64 bit, contrairement à ses prédécesseurs qui n’acceptaient que le 32 bit.
Son processeur I3 dual core, accompagné de 8 GB de RAM DDR4 et d’un disque SSD 128Go lui offre une puissance de calcul que ces prédécesseurs n’ont jamais atteint.
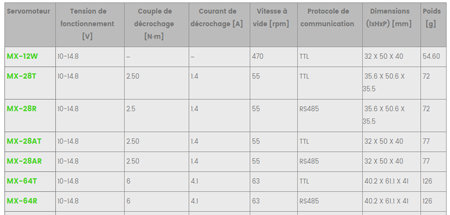
Cette puissance permettra de contrôler, via une carte Open CR , les 20 servomoteurs XM430 présents sur le robot pour 20 degrés de liberté. Ces XM430 offre une puissance de rotation supérieure aux MX-28, présents sur la génération précédente Darwin OP2 et permet donc des actions plus contraignantes.
|

|
| Tableaux comparatifs des servos Dynamixel | Test du servomoteur Dynamixel XM-430 |
De plus, les connexions avec le Robotis OP3 sont facilitées, avec le remplacement d’un branchement HDMI à la place de mini-HDMI, et la présence nouvelle d’un module Bluetooth.
Equipé d’une caméra Logitech C920 définition Full HD ainsi de de capteurs IR, le Robotis OP3 peut analyser et interagir avec son environnement ainsi que l’utilisateur via des haut-parleurs et un microphone.
Son gyroscope et de son accéléromètre, tous deux 3-axes, lui permettent de faire face à des imprévus. Compatible avec
ROS
via Kinetic sur Ubuntu Xenial, il dispose d’une documentation complète, que ce soit sur le wiki-ros, ou les e-manuels pour les servomoteurs Dynamixel et le robot en lui-même.
Toute cette documentation est répertoriée sur le
GitHub qui lui est dédié
.
Que peut faire le robot Robotis OP3 ?
A l’aide d’un nouvel algorithme plus puissant et de sa caméra Full HD, son traitement de la vision devient plus développé et précis. Il peut facilement exécuter un suivi de visage ou bien distinguer les couleurs et les formes.
Parmi ses 20 servomoteurs, 12 sont situés dans la partie basse du corps, lui permettant ainsi un déplacement précis, même sur des pentes inclinées.
En plus de pouvoir le programmer afin de définir ses déplacements ou réactions, la compatibilité ROS fournit à l’utilisateur la possibilité de le piloter manuellement.
Quelles applications pour le robot humanoïde Robotis OP3 ?
Ces deux aspects de pilotage rendent ce robot intéressant dans différents domaines, notamment :
- L’éducation, pour apprendre codage, pilotage et interaction avec la robotique
- La recherche, grâce à ses différents capteurs et sa caméra
Il pourra accéder à des endroits difficiles d’accès, et son magnétomètre 3-axes pourra enregistrer des nombreuses informations. Ces équipements permettront aussi d’effectuer des recherches sur l’IA, mais aussi d’anticiper de possibles problèmes ou inconvénients sur des robots grandeur nature. Un des paramètres, qui a été étudié récemment sur un petit robot humanoïde, concerne le temps d’accélération des moteurs, qui peut être problématique dans des domaines demandant une précision élevée. Une autre étude a été effectuée à l’aide de l’un d’entre eux, pour analyser les piques de puissance lors de l’enclenchement des moteurs, paramètre important pour établir l’alimentation d’un robot.
Comment le Robotis OP3 se compare-t-il aux autres robots humanoïdes de taille équivalente sur le marché ?
Pour un prix qui se situe dans la moyenne, vous aurez un robot équipé d’un ordinateur plus puissant que beaucoup de ses concurrents. Comme son prédécesseur de chez Robotis, le robot Darwin OP2, le Robotis OP3 est open-source, contrairement à d’autres robots de même catégorie, comme le robot NAO. De plus, il s’agit d’une des rares plateformes regroupant cette caractéristique avec la compatibilité Windows x32/x64 et Linux x32/x64.
Il s’agit donc d’un robot complet, très polyvalent, qui pourra répondre à beaucoup d’attentes.