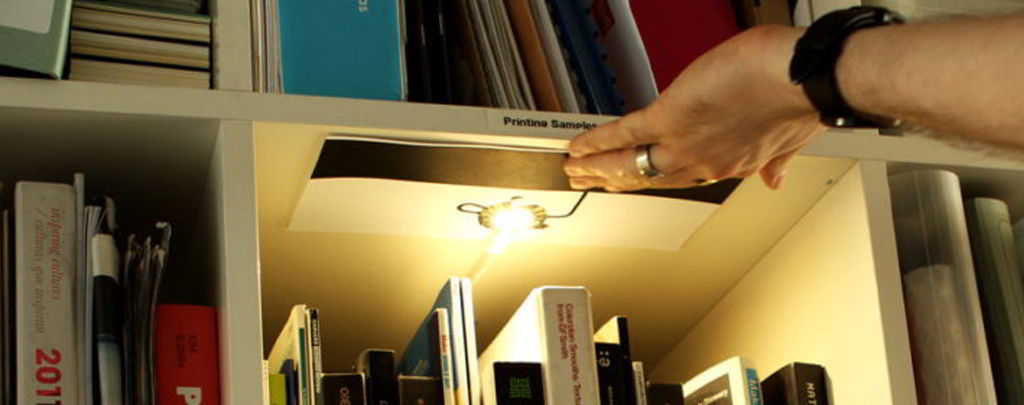
Fabriquez une lampe tactile pour votre bibliothèque avec Bare Conductive
Tranche d’âge : 14 ans et plus Difficulté : intermédiaire Durée : 120 minutes (le temps que la peinture sèche) Matériel : => Un kit lumière Bare Conductive => Un pot de peinture conductrice 50ml => Une batterie externe (power bank) ou un adaptateur mural pour câble USB => Une rallonge (optionnel) => Du papier[…]
Read this article >>