
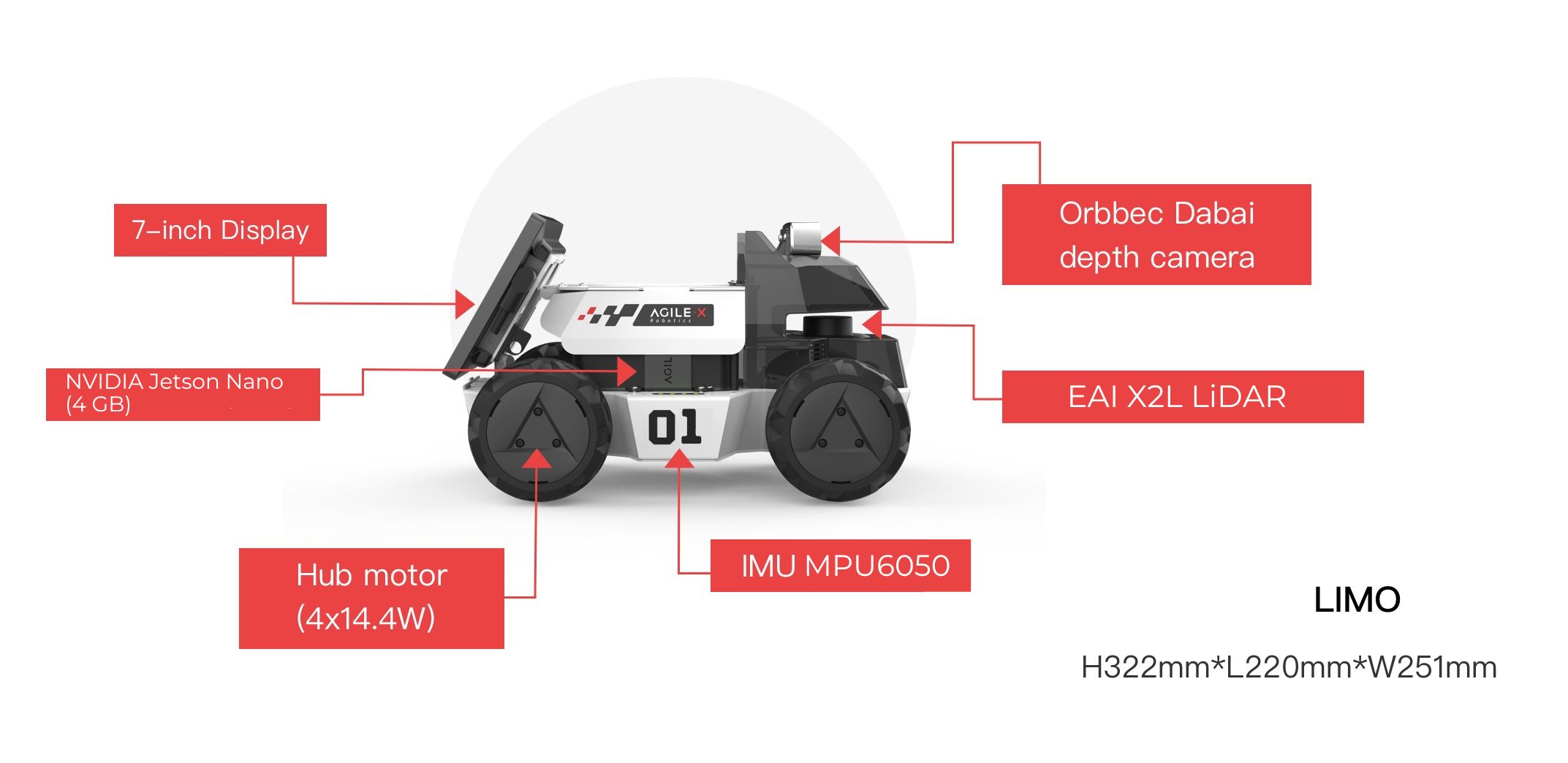
LIMO STANDARD
Dans sa configuration standard, le robot mobile LIMO est équipé d’une Nvidia Jetson Nano, d’un LiDAR EAI X2L et d’une caméra de profondeur Orbecc DaBai.
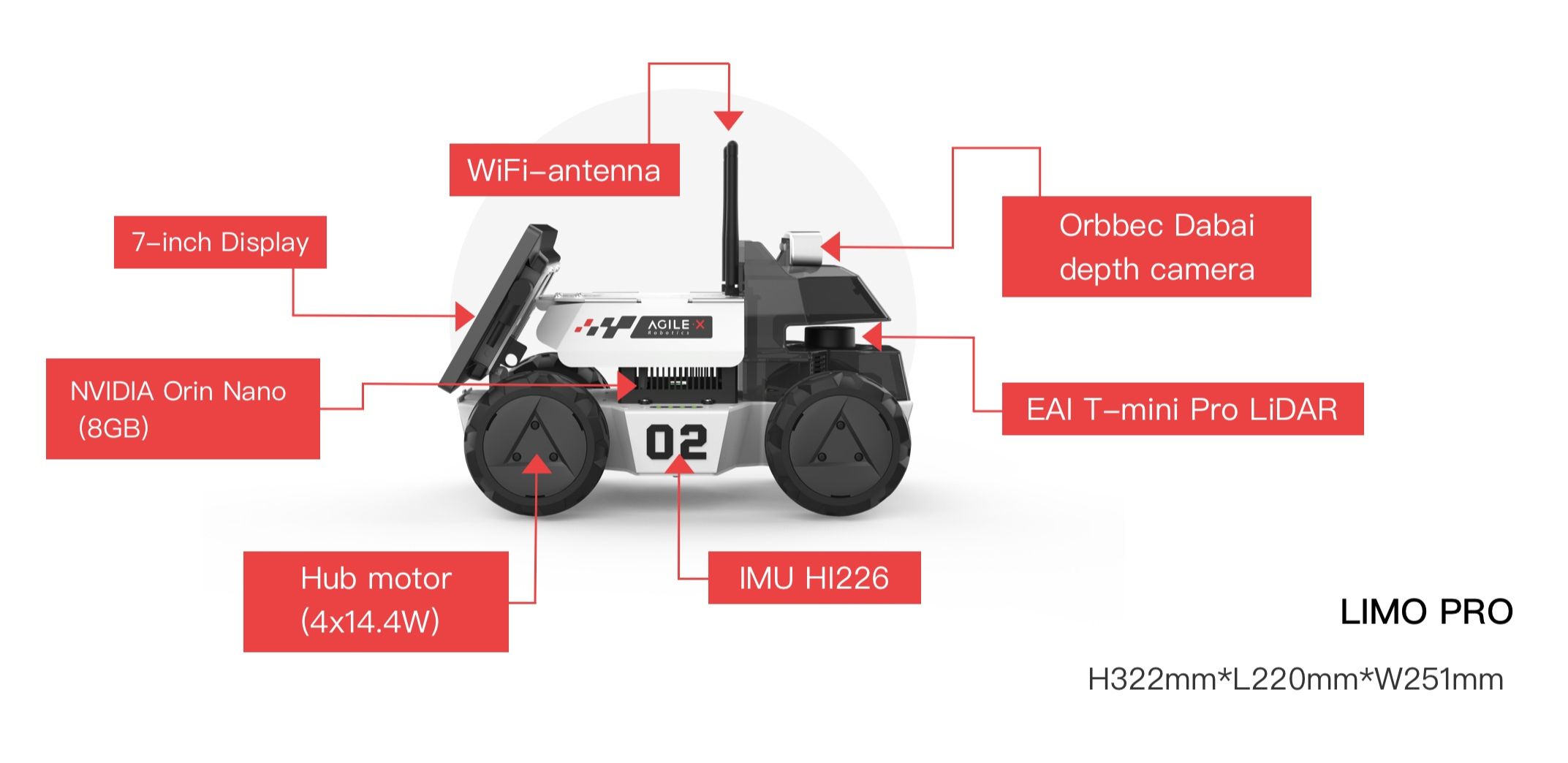
LIMO PRO
La version professionnelle du robot mobile LIMO est équipée de la puissante NVIDIA Orin Nano, d’un LiDAR EAT T-mini Pro, ainsi que de la caméra de profondeur Orbbec Dabai. Ces capteurs puissants confèrent au robot une perception robuste de son environnement, le rendant idéal pour le développement d’applications de navigation autonome, d’évitement d’obstacles et de reconnaissance visuelle. LIMO PRO s’avère être une plateforme robotique de premier choix pour les étudiants et les chercheurs. Ses multiples capteurs et logiciels avancés facilitent l’apprentissage immersif. La compatibilité de LIMO PRO avec ROS 1 Noetic et ROS 2 Foxy assure une intégration logicielle flexible. En outre, sa batterie offre une autonomie allant jusqu’à 2,5 heures d’utilisation continue.
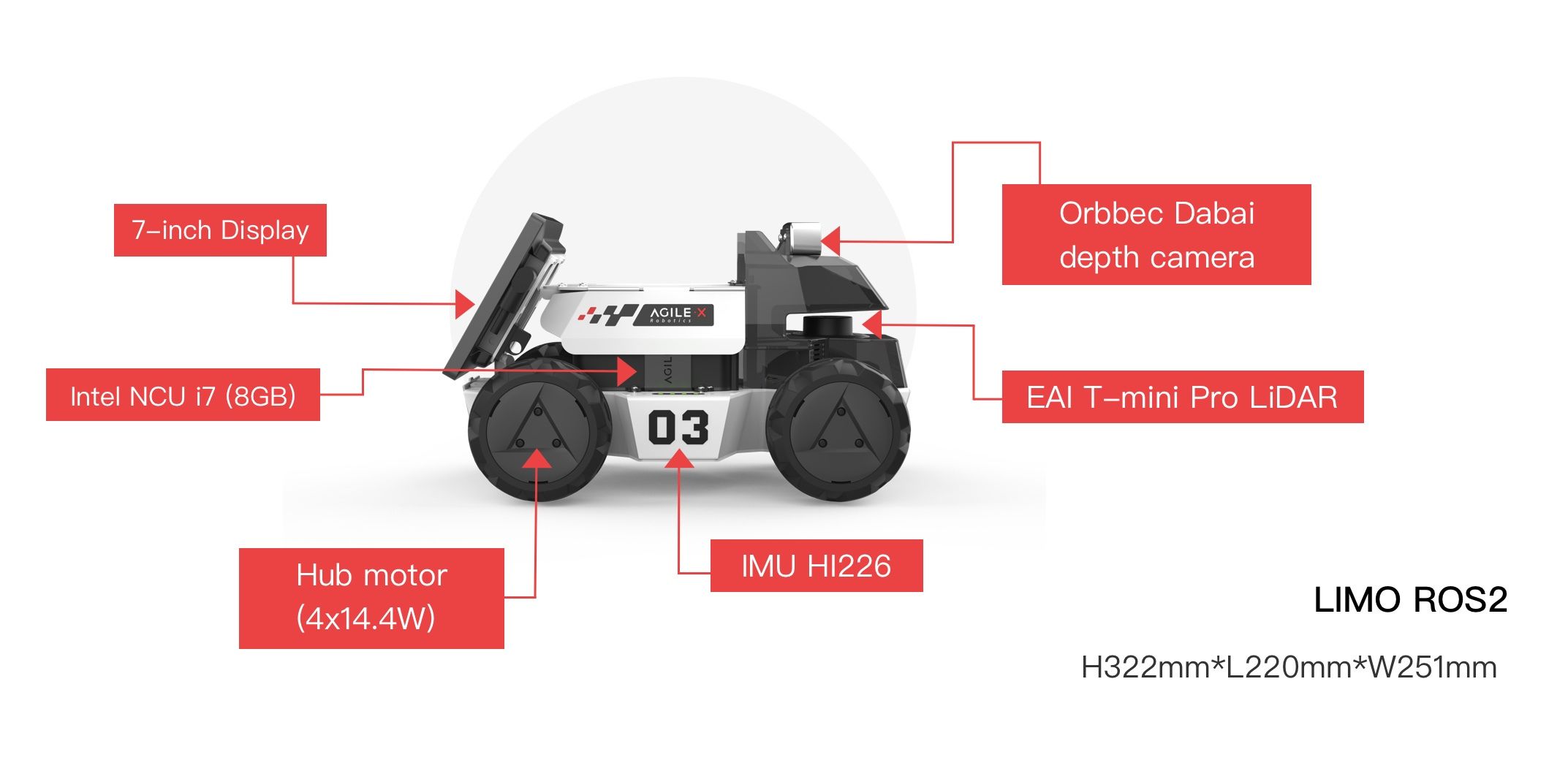
LIMO ROS 2
Le robot mobile LIMO ROS 2 est pourvu d’un processeur Intel NCU i7, ce qui lui permet d’exécuter ROS 2 sur Ubuntu 22.04. Cette version se révèle particulièrement adaptée à la recherche et à l’enseignement dans le domaine de la robotique autonome.
LIMO ROS 2 offre la possibilité d’explorer les toutes dernières fonctionnalités de ROS 2, intégrant les principaux cadres open-source, tels que Navigation2 pour la navigation des robots mobiles et MoveIt2 pour la planification avancée des mouvements des bras robotiques. En outre, LIMO ROS 2 bénéficie d’une autonomie longue durée, offrant jusqu’à 2,5 heures d’utilisation continue.