-
 Visitez notre boutique
Visitez notre boutique
-
Français

Les robots mobiles autonomes sont devenus des outils incontournables pour la recherche et l’innovation. Husarion, entreprise spécialisée dans la robotique mobile, propose des solutions avancées pour répondre aux besoins des chercheurs et ingénieurs du monde entier. À travers plusieurs projets de recherche, découvrez comment le robot Panther s’impose comme une solution innovante dans des environnements complexes comme l’aviation ou l’agriculture.
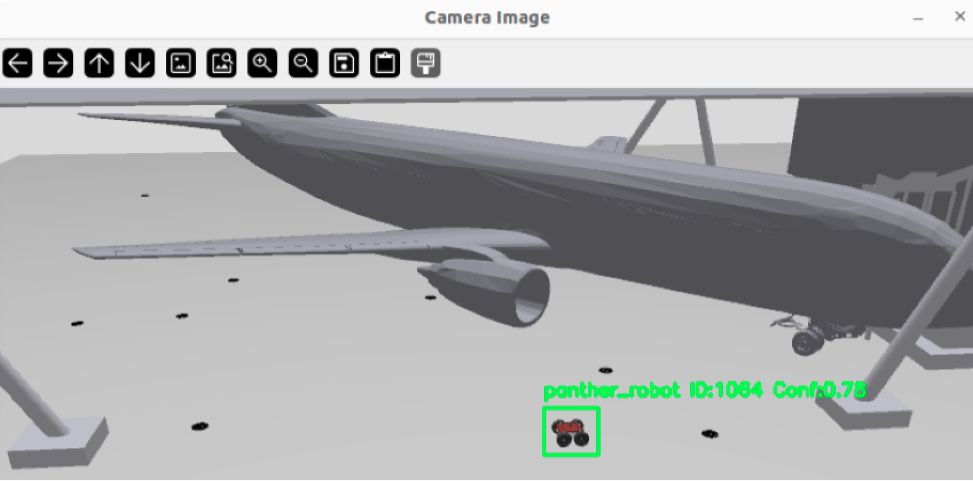
Dans l’environnement d’un hangar, la navigation robotique est rendue difficile par l’absence de caractéristiques marquées, l’éclairage variable et les surfaces réfléchissantes qui interfèrent avec les capteurs. Les méthodes traditionnelles de localisation telles que le GPS sont inefficaces, tandis que les IMU et les odomètres présentent des dérives et des imprécisions.

Une étudiante en robotique à l’Université Cranfield, a eu l’idée d’utiliser plusieurs caméras externes pour capturer des images du robot Panther dans le hangar. Ces images sont ensuite traitées à l’aide du modèle d’apprentissage profond YOLOv8, permettant de détecter des objets en temps réel et de calculer les coordonnées pixel qui sont transformées en positions réelles dans l’espace.
Pour affiner la précision de la localisation, les données des caméras externes, des IMU et des odomètres sont fusionnées grâce à des techniques de fusion de capteurs, notamment le Filtre de Kalman Étendu (EKF).
Une autre méthode de localisation est l’utilisation de la technologie Ultra-Wideband (UWB) pour améliorer la précision de la navigation du robot Panther. Un étudiant en robotique a intégré des balises UWB au robot, associées à des capteurs traditionnels tels que des LIDAR, IMUs et odomètres. Grâce à la fusion de capteurs via EKF, cette configuration permet d’atteindre une précision de l’ordre du centimètre, même dans des environnements intérieurs encombrés.
La technologie UWB fonctionne en envoyant des impulsions radio à faible puissance sur une large bande de fréquences. Grâce à ses capacités de détection de distance et de calcul du temps de vol (ToF), elle permet une précision centimétrique et résiste aux interférences dans des environnements complexes comme les hangars.
Le projet a montré des améliorations significatives dans la précision de la localisation grâce à l’intégration de l’UWB. Les premiers tests ont révélé une amélioration de 30 % de la précision de localisation par rapport à l’utilisation seule du SLAM Toolbox. Les prochaines étapes incluent des tests en conditions réelles dans des hangars et l’extension des capacités des capteurs pour une navigation encore plus précise avec l’intégration de caméras 3D et d’un LIDAR 3D.
« Le robot Panther est la plateforme idéale pour nos besoins d’apprentissage. Il permet aux étudiants de travailler avec un véritable robot, de tester des capteurs dans des environnements variés et d’acquérir des compétences pratiques dans un cadre réel. »
L’Alliance Bioversity & CIAT utilise le robot mobile Panther de Husarion pour cartographier le carbone organique du sol dans le cadre du Carbon Sequestration Project, un projet financé par le Bezos Earth Fund. L’objectif est d’améliorer la capacité des sols tropicaux à stocker le carbone en développant de nouvelles variétés de plantes, comme des herbes fourragères et du riz, dotées d’une assimilation renforcée du carbone par la photosynthèse et d’un enracinement plus profond.

L’agriculture représente environ 10 % des émissions mondiales de CO₂ mais elle peut aussi jouer un rôle clé dans la capture du carbone via la photosynthèse. En améliorant la capacité des sols à stocker du carbone, il est possible de ralentir l’augmentation de la concentration de CO₂ dans l’atmosphère et ainsi atténuer le changement climatique.
Pour évaluer l’efficacité des nouvelles variétés de plantes et mesurer le stockage du carbone, l’Alliance Bioversity & CIAT utilise une approche de cartographie des sols basée sur deux technologies principales :
Panther sert de plateforme mobile pour ces capteurs. Il est équipé d’un GPS, d’un système de communication avancé (Wi-Fi, 4G LTE) et de logiciels open-source basés sur ROS, facilitant son intégration et son déploiement sur le terrain. Grâce à sa conception robuste, avec des roues tout-terrain et un indice de protection IP66, il peut naviguer dans des environnements agricoles difficiles tout en minimisant l’impact sur les cultures grâce à son poids modéré.

L’utilisation de Panther permet aux chercheurs de cartographier avec précision le carbone du sol, d’optimiser les stratégies de séquestration du CO₂ et d’aider les agriculteurs à
L’Alliance Bioversity & CIAT explore ainsi comment la robotique et les technologies numériques peuvent transformer l’agriculture et contribuer à la préservation de l’environnement.
L’Australie, berceau des noix de macadamia, fait face à un défi majeur : des pertes importantes pendant la récolte. Pour résoudre ce problème, l’Université RMIT a décidé d’utiliser la plateforme robotique Husarion Panther afin de récupérer les noix perdues et améliorer l’efficacité de la récolte.
L’Australie, qui détient une part de marché de 18-20 % des noix de macadamia, a vu sa position de leader mondial supplantée par l’Afrique du Sud. Parmi les raisons de cette chute, la perte de noix lors de la récolte se distingue comme un problème majeur. En effet, les terrains irréguliers et l’incapacité des équipements traditionnels à accéder à certaines zones rendent la collecte difficile, laissant jusqu’à 10 % des noix perdues chaque année. Ce projet innovant a pour but de résoudre ce problème et de permettre à l’Australie de reconquérir sa place sur le marché mondial.

Le robot Panther de Husarion est équipé de technologies de pointe pour répondre aux défis de la récolte des noix de macadamia. Grâce à un LIDAR 3D et une caméra Zed2i, associés à un bras robotisé, Panther peut localiser et récolter les noix tombées au sol, même dans des environnements difficiles.

“Nous avons choisi Panther en raison de la réputation de Husarion, qui nous a été présentée en 2019 avec le ROSbot, utilisé pour l’enseignement dans notre laboratoire d’innovation en IA et en robotique à RMIT. Nous avons été impressionnés par la qualité des plateformes Husarion ainsi que par la réactivité de leur équipe qui nous soutient tant sur le plan logiciel que matériel.