
Cet article concerne un enseignement utilisant des robots par 3 enseignants auprès de 18 élèves-ingénieurs confinés à leurs domiciles pendant la phase 1 du coronavirus durant le mois de juin 2020. Il fournit un premier bilan ainsi que plusieurs conseils méthodologiques et pratiques pour répéter cet enseignement.
Objectif de la formation ROS4.PRO
L’objectif est de fournir à 18 élèves-ingénieurs confinés à domicile une formation ROS (Robot Operating System) durant 10 demi-journées. Ces étudiants sont en formation à IMERIR et possèdent de solides compétences en robotique et en informatique.
C hoix initial : des robots non simulés donc réels
Une solution pédagogique courante pour de tels enseignements à distance est l’utilisation de simulateurs physiques qui nécessitent pour seul matériel de simples ordinateurs. Cette solution présente des limites.
Limite 1 : simulation réaliste de l’environnement physique
Il est difficile de simuler de façon réaliste la physique et la dynamique de l’environnement robotique . Par exemple, la simple saisie et dépose d’objets par un bras manipulateur est difficile à reproduire en simulation. Les frottements simulés ne sont pas corrects, le paramétrage des caractéristiques physiques des matériaux en jeu est laborieux, les solveurs donnent des résultats non stables.
En conséquence, au lieu de simuler la physique entre l’objet et le manipulateur robotique lors de la saisie de l’objet, on décrit dans un programme informatique la saisie de l’objet et le mouvement du bras manipulateur.
Cela aboutit à deux inconvénients :
- Le premier est l’écriture de code supplémentaire
- Le second est la réalisation d’une simulation irréaliste réussissant dans 100% des cas
Limite 2 : interaction humaine
La seconde limite concerne l’interaction humaine. L’une des récentes innovations majeures pour l’ industrie 4.0 est la cobotique , ou robotique collaborative.
En effet, de nouvelles capacités sont rendues possibles par l’ interaction physique entre un opérateur humain et une machine . Il peut s’agir par exemple de programmer un robot en le manipulant avec la main, de permettre au robot d’être déplacé par un opérateur durant sa tâche, ou encore de suivre le mouvement d’un expert.
Cette interaction homme-robot ne peut par définition pas être simulée par ordinateur.
Pour ces raisons, les enseignants ont choisi de doter chaque apprenant d’un kit robotique.
La gestion de 18 robots à distance
Les moyens matériels pour cette formation ROS.4
Chaque étudiant confiné à domicile disposait :
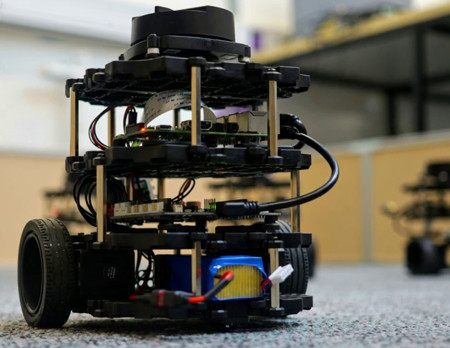
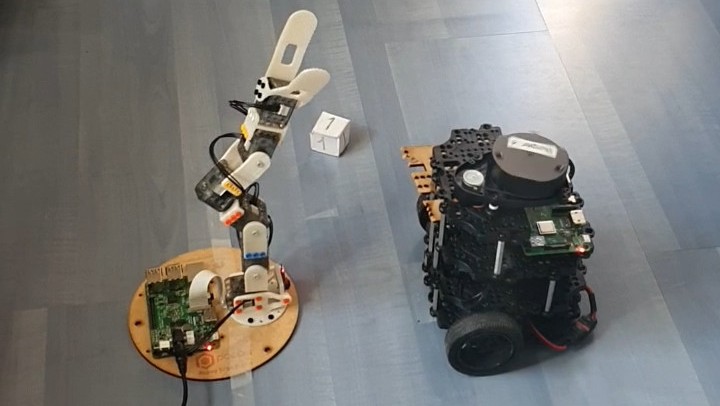
- D’un Turtlebot 3 contenant une carte Raspberry Pi sous Linux
- D’un Poppy Ergo Jr contenant une carte Raspberry Pi sous Linux
- D’un ordinateur portable installé sous Ubuntu 18.04
- D’une connexion personnelle à Internet

Les outils de classe virtuelle adoptés étaient :
- Moodle , sur lequel l’ensemble des questions du TP étaient détaillées et où étaient centralisées les ressources
- BigBlueButton (BBB) , pour l’audio et le visuel, avec les fonctionnalités de salles de réunion, tableau blanc partagé et sondage
3 enseignants se sont réparti les 35 heures que dure la formation.
Les moyens logistiques mis en oeuvre
La distribution et la rapatriement du matériel ont été réalisés par le service logistique de Génération Robot .
Il est important que chaque colis dispose d’une feuille d’inventaire listant l’ensemble des composants.
Il était demandé à chaque apprenant de cocher chaque composant dès réception, communiquer le scan de l’inventaire à l’enseignant, et recommencer la même procédure avant le rapatriement.
Le diagnostic à distance des problèmes techniques
Le diagnostic des problèmes techniques est la principale difficulté des enseignements techniques à distance. La première raison est que l’intervenant doit utiliser la médiation de l’apprenant, non expérimenté, pour réaliser le diagnostic. La seconde raison est le nombre de machines à gérer.
Pour gérer ces problèmes, nous préconisons :
- D’utiliser du matériel robuste , avec lequel l’ enseignant est familier
- De préparer une procédure de diagnostic écrite
- D’utiliser les robots des autres membres du groupe lorsque l’un des membres ne peut plus utiliser le sien à cause de dysfonctionnements
Organisation générale pédagogique
Interaction avec la classe entière
Plusieurs interactions sont nécessaires avec la classe entière. Les premières sont d’ordre administratif (appel, constitution des groupes). Elles sont réalisées simplement et en quelques secondes au moyen du tableau blanc virtuel en mode partagé .
La seconde interaction est celle qui permet à l’enseignant d’évaluer en continu l’assimilation par les apprenants. Lors du cours magistral qui dispense via BBB quelques aspects théoriques, les apprenants sont plus enclins à écrire via le chat qu’à prendre la parole . De plus, les collisions de prise de parole sont plus compliquées à gérer en distanciel qu’en présentiel. En classe entière les apprenants utilisent ainsi plutôt le chat tandis que l’enseignant s’exprime à l’oral.
Pour renforcer la vérification des acquis, un quiz sur les notions abordées le jour précédent était réalisé simplement sous forme de réponses sur le chat ou bien de sondage.
Interaction en travaux pratiques par groupe
Comme en présentiel, les TP en distanciel sont bien plus vertueux s’ils sont réalisés en groupe.
La première raison est qu’ un groupe soudé multiplie sa capacité à résoudre les problèmes rencontrés individuellement par les apprenants sans l’intervention de l’enseignant.
Pour faire appliquer et respecter le cadre de travail en groupe, les critères de notation ont été adaptés et ont été explicités dès le début de l’enseignement. Nous avons laissé libres les étudiants pour constituer leurs groupes.
La seconde raison de préférer le travail en groupe est que, lorsque l’enseignant intervient, il peut intervenir de façon adaptée auprès de chacun, et ce sans perturber les autres.
Chaque groupe de travail disposait d’une salle de réunion virtuelle qui lui était dédiée, fournie par BBB. Les apprenants s’exprimaient plus facilement au sein des groupes de travail que dans la classe entière. Cependant, il était difficile pour un apprenant de solliciter l’enseignant lorsqu’il se trouve avec un autre groupe. Pour tenir le calendrier, nous avons fourni une séquence complète de jalons . De plus, nous fournissions les solutions pour les groupes trop en retard.
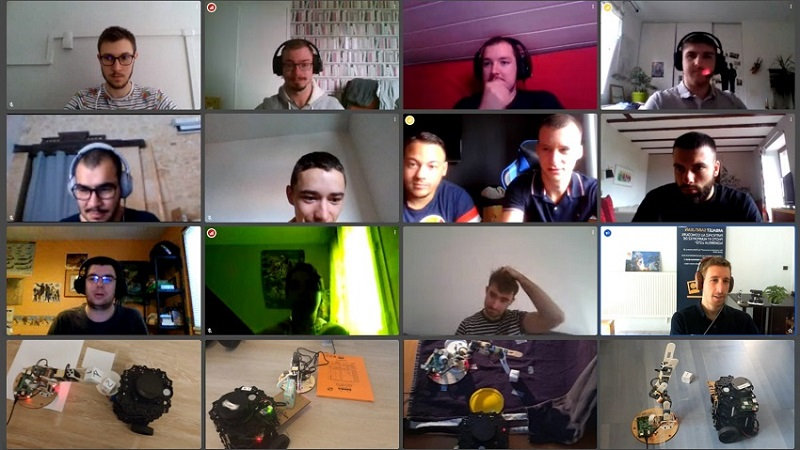
Nous avons tenu à laisser chaque apprenant libre d’activer ou non sa caméra . Tout le monde a cependant apprécié qu’une photo de classe entière soit réalisée le dernier jour :
Conclusion de cette expérience
Au commencement de cette expérience éducative, utiliser des robots réels ne faisait aucune doute. Le soutien de Génération Robots a été déterminant. La réalisation a cependant révélé de nombreuses surprises . Les enseignants ont ainsi dû dépenser plus de temps et d’énergie que prévu.
Au vu du des résultats au questionnaire anonyme réalisé auprès des apprenants, et au vu de leur implication pendant et en dehors des séances, ces derniers ont exprimé leur grande satisfaction .
L’équipe pédagogique d’ IMERIR plébiscite ce format d’enseignement. Décide de le reconduire l’année prochaine. Et de le promouvoir dans toute la Catalogne !
Plus d’informations sur la formation ROS4PRO ici : http://ros4.pro
Cet article a été rédigé par :
Yoan MOLLARD, ingénieur pédagogique Bordeaux INP
Denis LAPOIRE, vice-président formation Aquitaine Robotics
Laurent DENET, directeur IMERIR
Laurent VERDIER, administrateur des ventes Génération Robots
|
|
|
|
|
|
|