Nouveau package ROS: Baxter Tasker
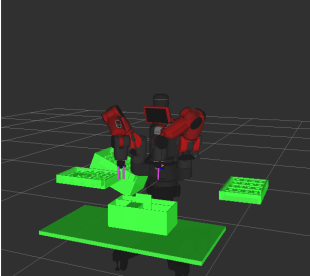
Baxter Tasker est un nouveau package ROS créé par Génération Robots pour le fameux robot Baxter Research de Rethink Robotics. Baxter Tasker offre une interface pour contrôler votre ordinateur et le robot Baxter, créé pour mettre en place un comportement de « pick and place », et qui génère automatiquement du code Python pour ce dernier. Ainsi[…]
Read this article >>


