Comparison of Intel RealSense cameras
 D405
D405 |
 D455
D455 |
 D435/D435I
D435/D435I |
 D415
D415 |
|
| Applications | A small, lightweight camera for short-range operations | A camera for longer range applications | A camera with a wide field of view, ideal if your robot moves quickly or outdoors | A camera for high-precision solutions |
| Depth module | D401 | D450 | D430 | D415 |
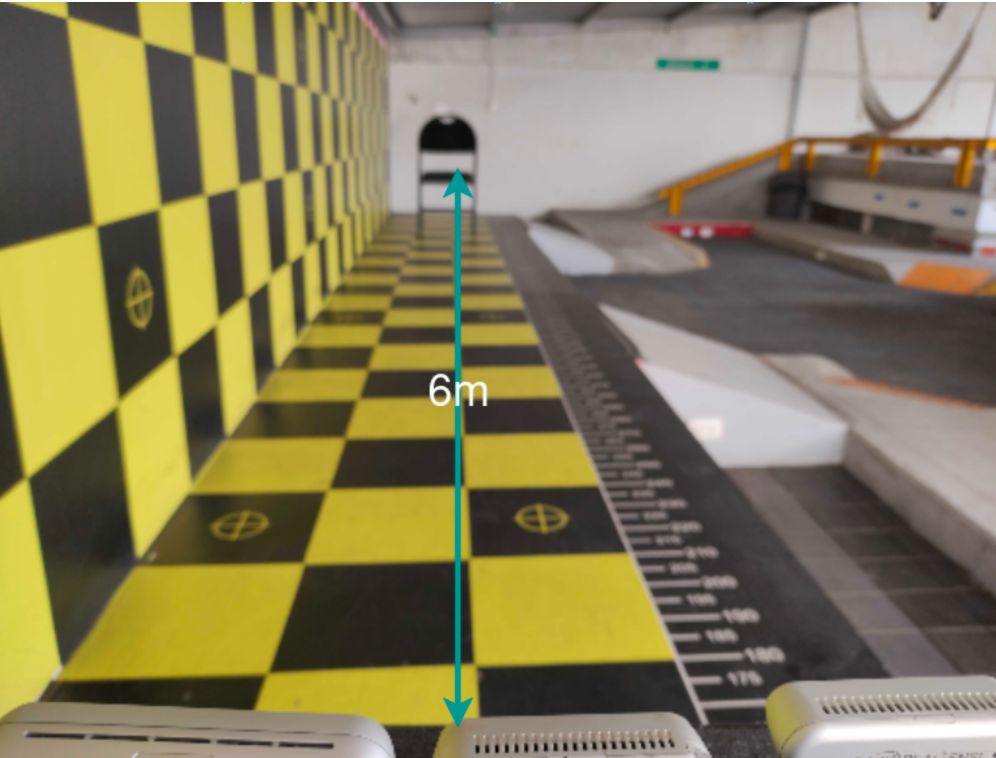
| Recommended range | 7 to 50 cm | 40 cm to 6 m | Approx. 10 metres | Approx. 10 metres |
| Use | Indoors and out | Indoors and out | Indoors and out | Indoors and out |
| Accuracy | +/-2% at 50 cm | +/-2% at 40 cm | +/-2% at 30 cm | +/-2% at 50 cm |
| Resolution | Up to 1280 x 720 | Up to 1280 x 720 | Up to 1920 x 1080 | Up to 1920 x 1080 |
| Field of view | 87° x 58° | 86° x 57° (+/- 3°) | 86° x 57° (+/- 3°) | 65° (+/- 2°) x 40° (+/- 1°) x 72° (+/- 2°) |
| Image sensor | OV9782 | OV9782 | OV2740 | OV2740 |
| Dimensions | 36.5 × 19.4 × 10.5 mm | 124 x 26 x 29 mm | 90 x 25 x 25 mm | 99 x 20 x 23 mm |
| IMU | No | Yes | D435: No / D435i: Yes | No |
Comparison of Luxonis OAK cameras
 OAK-1 |
 OAK-D Lite |
 OAK-D S2 |
 OAK-D Pro |
|
| Stereo vision | No | Yes | Yes | Yes |
| Night vision | No | No | No | Yes |
| Camera | 1x RGB 12M | 2x B/W 1x RGB 13M | 2x B/W 1x RGB 12M | 2x B/W 1x RGB 12M |
| Field of view | 78° | 81.3° | 78° | 81° |
| Wide angle | No | No | Yes | Yes |
| Connection | USB or PoE | USB | USB or PoE | USB or PoE |
| Image sensor | IMX378 | IMX214 | IMX378 | IMX378 |
| Dimensions | 36 x 54.5 x 27.8 mm | 91 x 28 x 17.5 mm | 97 mm × 29.5 mm × 22.9 mm | 97 mm × 22.9 mm × 29.5 mm |