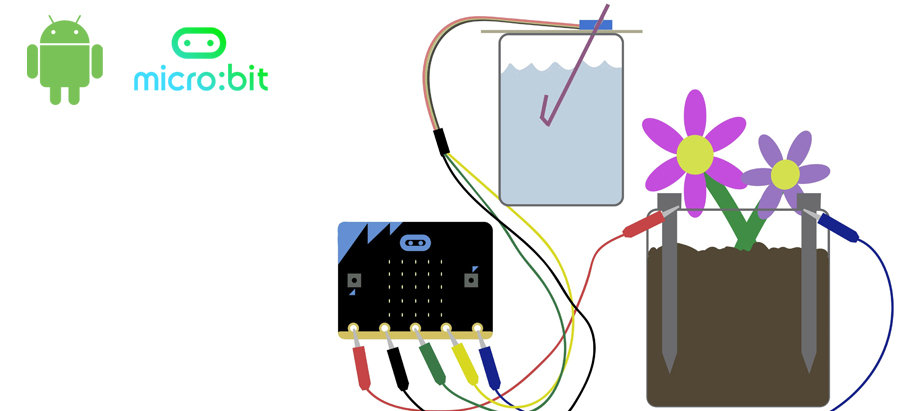
Programmieren Sie Ihre micro:bit auf Ihrem Smartphone wo auch immer Sie sich gerade aufhalten
Diesen Sommer, programmieren Sie wo auch immer Sie sind Ihre micro: bit auf Ihrem Smartphone Wussten Sie das es möglich ist eine micro:bit Karte mit einem Smartphone zu programmieren ? Für diejenigen die micro:bit nicht kennen, es handelt sich dabei um einen Single Board PC (wie Raspberry Pi oder Arduino ) der von der BBC[…]
Read this article >>