
Wichtige Software-Verbesserungen für den Baxter Roboter
Rethink Robotics, der Hersteller des kooperativen Roboters Baxter, hat soeben neue Versionen der Softwareprogramme “Manufacturing” und “SDK” für den Baxter angekündigt.
Den Baxter gibt es in zwei Exemplaren: Die Manufacturing-Version für Profis, basierend auf einer Software, bei der die gesamte Programmierung durch Vorzeigen erfolgt. Man führt den Arm des Baxter und nutzt dabei die darauf angebrachten Tasten. Die Version für Forschung und Lehre wiederum wird mithilfe eines
SDK ROS
(Robot Operating System) über einen an den Baxter angeschlossenen PC programmiert. Beide Baxter-Versionen laufen mit derselben Hardware.
SDK ROS 1.0 für den Baxter für Forschung und Lehre
Der Umstieg von der Version 0.7 auf die Version 1.0 des SDK Baxter zeigt bereits, wie wichtig dieses neue Release ist. Die Version für Forschung und Lehre des Baxter Roboters, die bei Universitätslabors und privaten Forschungszentren breiten Einsatz findet, eignet sich für die Durchführung von F&E-Programmen in der kooperativen Robotik.
Was bringt diese neue Version des SDK ROS für Baxter? Die neue Version bietet folgende Weiterentwicklungen:
-
Integrierter PC-Zugriff des Roboters über SSH – so kann ROS-Code lokal auf dem Roboter laufen. Diese Verbesserung wurde von der Community bereits dringend erwartet.
Damit können die Leistungsdaten des Roboters wesentlich verbessert werden. Vollständige Kompatibilität mit den bewährten ROS-Tools und -Librarys: Gazebo Simulator, Rviz und natürlich die MoveIt-Library.
Diese vollständige Kompatibilität des Roboters wird das Code- und Kompetenz-Sharing zwischen Anwendern der Community weiter verbessern.

-
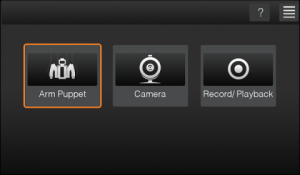
Baxter-Start im Demo-Modus In diesem Modus können sämtliche Funktionen des Baxter Roboters präsentiert werden. Dazu dient eine Schnittstelle, die über die an den Armen des Baxter angebrachten Tasten gesteuert wird. Die bereits vorhandenen Beispielen sind der “Puppet”-Modus, bei dem die Bewegung, die einem Arm gegeben wird, automatisch vom anderen Arm übernommen wird; der Kameramodus, bei dem das Kamera-Feedback auf dem Baxter-Bildschirm angezeigt wird, sowie der “Record/Playback”-Modus, bei dem Armbewegungen des Baxter gespeichert werden können. Die Arme werden manuell bewegt und der Baxter wird anschließend aufgefordert, die Bewegungsabläufe zu wiederholen.
- Zugriff auf ein Grafik-Menü zum Start der Baxter-Kalibrierung
- Ein neues Speicherprogramm für “Waypoints”, also Armpositionen im Raum
- Neue Optionen für eine fortschrittliche Netzwerkkonfiguration, um den Baxter besser ins Unternehmensnetzwerk zu integrieren
-
Außerdem wurden in diesem Release zahlreiche Verbesserungen hinsichtlich Präzision und Planung der Bewegungsabläufe vorgenommen, die den Baxter leistungsfähiger und effizienter machen.
SDK-Anwender erhalten darüber hinaus mehr Funktionen und Optionen, um präzisere, entwicklungsfähige und bedarfsoptimierte Codes zu erstellen.


Intera 2.1, die neue Version der Produktionssoftware für den Baxter
Intera heißt die neue Version der auf dem Baxter installierten Produktionssoftware. Es handelt sich um den Eckpfeiler des Angebots von Rethink Robotics, da mithilfe von Intera die kooperative Robotik erst möglich gemacht wird. Der Bediener kann auf intuitive Weise mit dem Baxter kommunizieren und benötigt weder besondere Vorkenntnisse in der Informatik noch in der Robotik, um dem Baxter die nötigen Handgriffe beizubringen. Damit ist diese Art von Roboter-Produktionssoftware eine Revolution in der industriellen Robotertechnik, bei der bislang der kooperative Aspekt zwischen Mensch und Maschine noch nicht ausgelotet worden ist.
In der Version 2.1 bietet Intera einen neuen Funktionsumfang, aber auch wesentliche Leistungsverbesserungen. Der Baxter Roboter aufgrund seiner Geschwindigkeit und Präzision in der Lage, dieselbe Aufgabe in der halben Zeit zu erledigen wie mit früheren Intera-Versionen.
Zu den funktionalen Verbesserungen zählt die Möglichkeit, selbst das Verhältnis zwischen Geschwindigkeit und Bewegungsgenauigkeit zu wählen, wenn man dem Baxter eine Aufgabe beibringt.

Ebenso kann der User über eine neue Menüschnittstelle manuell die Pick & Place-Vorgänge anpassen. Und eine Sicherheitsfunktion beschränkt den Zugriff auf die Lernschnittstelle des Baxter mithilfe eines speziellen USB-Sticks auf zugelassene Benutzer.