
Der Lernroboter mBot 2, der Anfang 2021 auf den Markt kam, stellt in mehrfacher Hinsicht eine Verbesserung gegenüber der V1 dar. In diesem Artikel erforschen wir die Unterschiede zwischen den Robotern mBot und mBot 2. Los geht’s!
mCode durch das CyberPi ersetzt
Im Roboter mBot 2 ist das CyberPi Board eingebaut – ein Mikrocomputer, der u. a. über folgende Komponenten verfügt:
- 1 Farbbildschirm 128 x 128 Pixel
- 3 Drucktasten
- 1 Joystick
- Verschiedene Sensoren und Aktoren (Lichtsensor, Mikrofon, Wi-Fi und Bluetooth, 5 RGB LEDs, Beschleunigungssensor/3-Achsen-Gyroskop, Lautsprecher)
CyberPi wurde zum Erlernen des Programmierens entwickelt, aber auch zum Entdecken des KI , der Vernetzung und des Internet of Things ( IoT ).
Das mCore Board , welches das Gehirn des ersten mBot bildet, war weniger gut ausgestattet und verfügte lediglich über einen Drucktastenschalter, einen Buzzer, einen Lichtsensor, 2 RGB LEDs, einen Empfänger und einen Infrarot-Empfänger.
Das CyberPi Board kann 8 Programme aufzeichnen – beim mCore ist es nur eins.
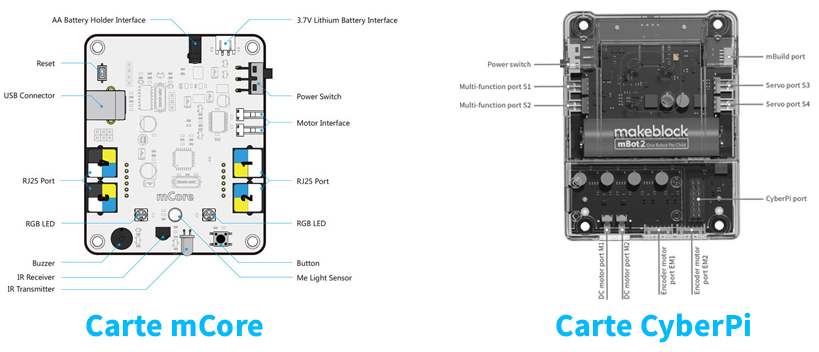
Mehr Anschlüsse
Die Version 1 des Roboters mBot verfügt über 4 Anschlüsse , die zum Anschließen von zusätzlichem Zubehör dienen. Bei der Version 2 können 2 zusätzliche Gleichstrommotoren sowie 5 Module oder 4 Servomotoren (und sogar ein Arduino Sensor!) angeschlossen werden.
Bitte beachten: das Format der Anschlüsse hat sich geändert! Bei den Anschlüssen handelt es sich nicht mehr um RJ25, sondern um mBuild Anschlüsse, kompatibel mit den von MakeBlock entwickelten mBuild Modulen.
Eine echte Verbesserung auf der Sensor-Ebene
Der Ultraschall-Entfernungsmesser , der nun durch ein Kunststoffgehäuse geschützt ist, verfügt über 8 einzeln programmierbare LEDs (als Ersatz für die berühmte LED Matrix).
Das neue Line-Follower-Modul (Quad RGB) verfügt über 4 Sensoren und kann u. a. Farben erkennen . So wird ein Ablesen von Farbcodes auf dem Boden möglich, wie es beim Roboter Ozobot der Fall ist. Darüber hinaus ist mBot weniger empfindlich gegenüber Interferenzen , die durch das Umgebungslicht entstehen.
Der Sensor der Version 1 konnte lediglich hellen Boden von dunklem Boden unterscheiden.
Die Motoren sind präziser (dank zusätzlichen Encodern), robuster und schneller.
Große Neuigkeit in Sachen Robotermotoren: diese sind nun mit Encodern ausgestattet, die eine bessere Präzision (5°) ermöglichen. Die Rotationsgeschwindigkeit beträgt zwischen 118 und 200 RPM und das Drehmoment erhöht sich um mehr als das Doppelte. Die Antriebswelle der Motoren besteht aus Metall (anstatt Kunststoff), was im Falle eines Sturzes eine höhere Stabilität gewährleistet.
Das Controllerboard des mBot ist mit dem selben Mikrocontroller wie das Arduino Uno ausgestattet.
Andere kleine Änderungen…
Das Chassis der Version 2 ist ein bisschen größer und bietet mehr Öffnungen, die zum Befestigen von Modulen oder Zubehörteilen dienen.
Die Stahlkugel an der Vorderseite des Roboters wurde durch eine geräuschärmere Nylonversion ersetzt.
Im Gegensatz zur ersten Version ist der mBot 2 mit Bluetooth und Wi-Fi ausgestattet. So ist kein Dongle mehr erforderlich! Somit können ganz schnell mehrere Roboter an das Netzwerk angeschlossen werden.
Im mBot 2 ist ein 2500 mAh Akku integriert. Der mBot hatte einen Akkuhalter (Akku optional, Batterien mussten separat erworben werden).
mBot 2 passt nach Zusammenbau in eine Box – ein nicht unbedeutender Vorteil!
Kompatibel mit mBlock 5 und Python Editor
Wie auch der mBot ist der mBot 2 mit mBlock 5 – einer auf Scratch 3 basierenden Programmierschnittstelle – kompatibel bzw. damit programmierbar, und zwar über Block und Python .
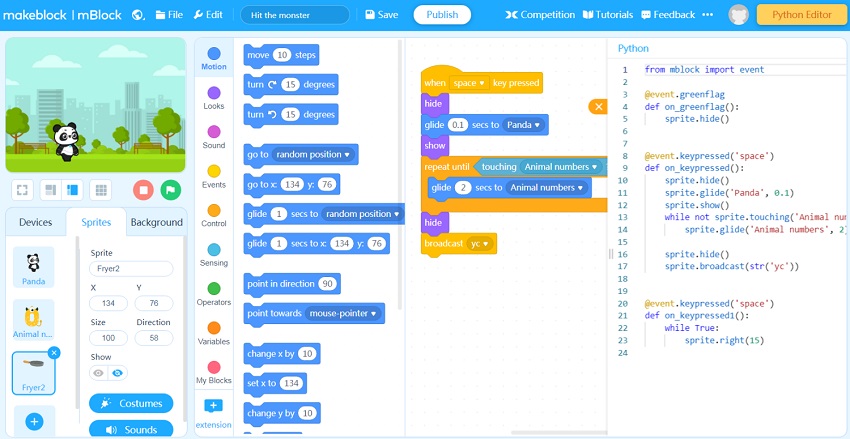
Ferner ist ein Programmieren mit dem Python Editor von MakeBlock möglich. Auch hier wurde die Version 5 von mBlock für IoT- oder KI-Projekte entwickelt. Beispielsweise ist es möglich, die von den Sensoren stammenden Daten zu erforschen , die Kurven anzeigen zu lassen usw.
