
Avec ce guide, vous aurez tout ce qu’il vous faut pour connecter, configurer et calibrer votre bras robotique Niryo One. Nous vous présentons également brièvement l’interface visuelle de programmation de Niryo One Studio, qui permet de programmer le robot avec des blocs d’instruction, comme Scratch ou Blockly.
Composition du kit Niryo One
Le kit Niryo One contient les éléments suivants :
- Un bras robotique Niryo One assemblé
- Un outil Gripper Standard ( Gripper 1 )
- Une alimentation murale 11.1V 6A (Europe)
- Un adaptateur universel
- Un jeu de quatre pieds et quatre ventouses
- Un ensemble d’outils (tournevis cruciforme, clés hexagonales, clé de 8 plate)
Vérifiez que vous avez bien tout en votre possession avant de continuer. Si vous avez un doute, n’hésitez pas à nous contacter !
Finition de l’assemblage du bras robotique
Le robot est livré pré-assemblé. A la réception, il ne reste qu’à fixer les pieds et le gripper.
Les quatre pieds doivent être montés à la base du bras afin de garantir son équilibre lors de l’utilisation. Chaque pied est maintenu par un écrou. Lors de l’ouverture, les écrous peuvent être vissés sur les ventouses. Si le robot n’a pas vocation à être déplacé, il est préférable d’installer les quatre ventouses à la place des quatre pieds.

L’outil “Gripper 1” (une pince) doit également être installé sur le robot en le clipsant dans l’encoche située au bout du bras robotique (n’ayez pas peur de forcer un tout petit peu ).
Lors de la première utilisation de l’encoche, il est possible que celle-ci soit bloquée. Un cutter peut être nécessaire pour la débloquer.

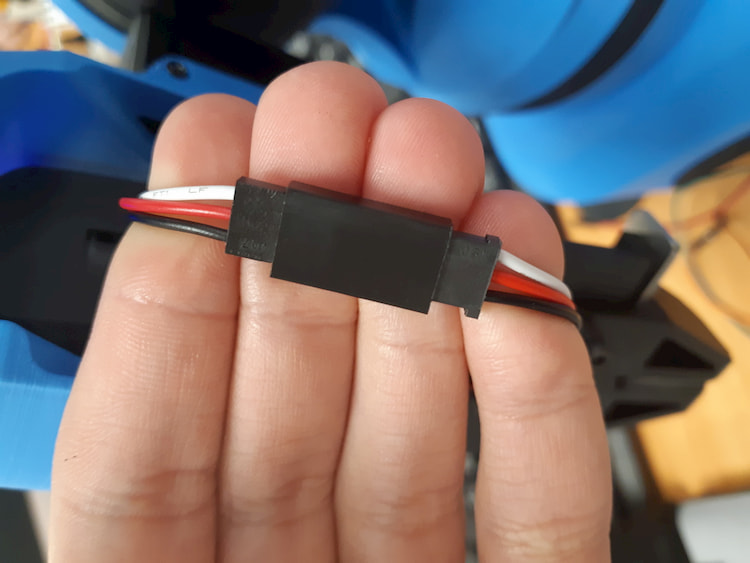
Lors de la connexion de l’outil Gripper, attention à connecter les fils de même couleur face à face.
Connexion de Niryo One à l’ordinateur
Pour débuter avec le robot Niryo One, il est recommandé d’installer le logiciel Niryo One Studio . Compatible avec les systèmes d’exploitation Windows, MacOS et Linux, il est configurable en français, anglais, allemand et russe.
Avant d’allumer le robot, assurez vous que celui-ci soit placé sur une surface plane et qu’il ne risque pas d’entrer en collision avec un objet ou une personne.
Brancher l’alimentation 11,1V/6A fournie avec le robot, puis allumez-le. La LED présente derrière la base du bras devrait s’allumer en rouge . Une fois que la LED est devenue bleue ou verte , le robot peut être connecté au logiciel Niryo One Studio. Cela peut prendre quelques dizaines de secondes.
- LED bleue : Niryo One prêt et en mode hotspot (partage de connexion), son adresse IP est 10.10.10.10
- LED verte : Nyrio One prêt et connecté à un réseau WiFi
Sur Niryo One Studio, l’interface de connexion WiFi s’affiche en cliquant sur l’icône roue crantée située à gauche de l’écran.
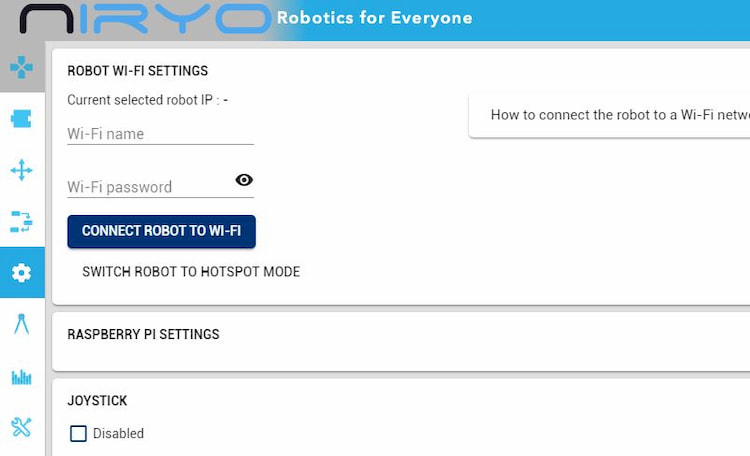
Connectez-vous au réseau WiFi commençant par “Niryo_One” avec le mot de passe niryoone . Ce réseau WiFi est généré par le robot. Il est également possible de connecter le bras robotique à votre ordinateur en utilisant un câble Ethernet.
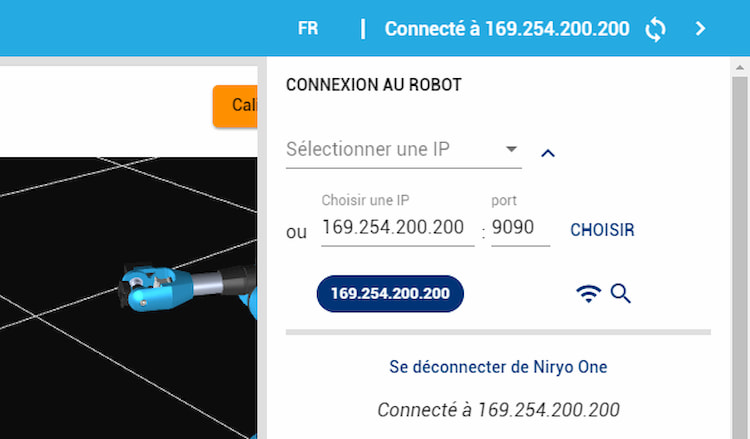
Si le robot est connecté à l’ordinateur via un câble Ethernet, l’interface de connexion s’ouvre en cliquant sur le symbole < situé en haut à droite de l’écran. L’’adresse IP doit être 169.254.200.200 (laissez le port sur 9090).
Calibration du bras robotique
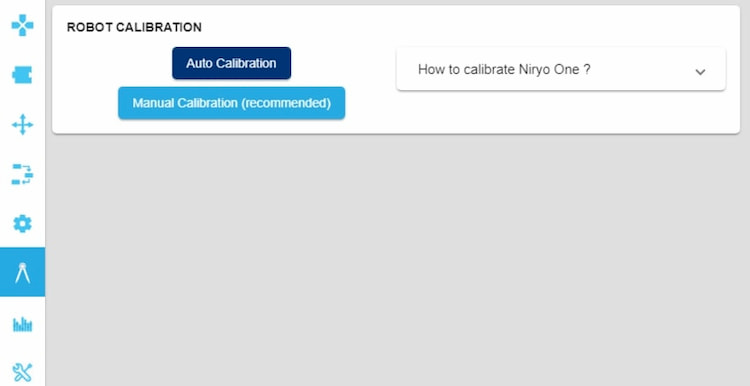
Une fois le robot connecté, les moteurs doivent être calibrés. Cliquez sur le sixième onglet (celui avec le compas) pour calibrer les moteurs manuellement ou automatiquement. La première fois que vous mettez le robot en route, choisissez la calibration automatique.
A la fin de la calibration automatique, vous pouvez déplacer le bras en utilisant les commandes du premier onglet du logiciel. Pour cela, déplacez le curseur du Joint de votre choix vers la droite ou vers la gauche, puis cliquez sur Move joints . Le bras se déplacera jusqu’à atteindre la position indiquée par les différents curseurs.
Premiers mouvements avec Niryo One
Nous vous conseillons dans un premier temps d’effectuer de petits mouvements, à vitesse réduite, afin de vous familiariser avec les sens de rotation des axes et la vitesse d’exécution du bras.
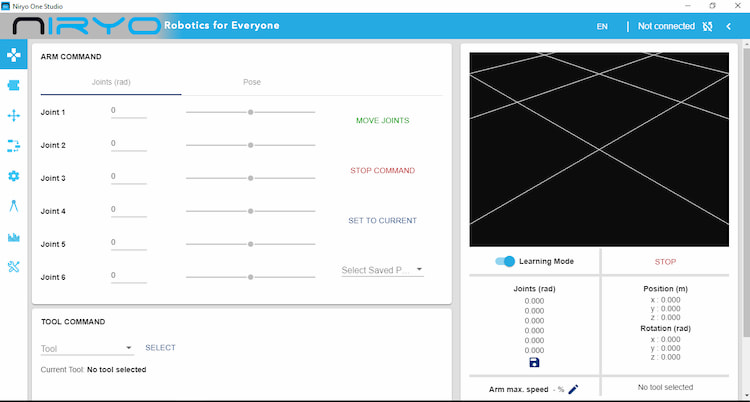
Pour utiliser l’outil monté sur le robot (ici le Gripper 1), allez dans la section Tool command , qui se trouve sous l’onglet Arm command que vous venez d’utiliser.
Sélectionnez le bon outil puis cliquez sur Select . Les commandes relatives à l’outil choisi apparaissent à droite du bouton Select .
Faites glisser le slider de la commande Open ou Close pour créer la commande de mouvement, puis cliquer sur Open ou Close pour l’exécuter.
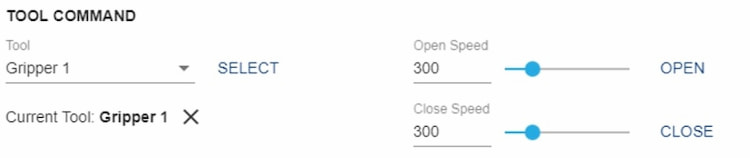
Le curseur permet de contrôler la vitesse d’ouverture et de fermeture du gripper.
Programmation avec le logiciel Niryo One Studio
Le logiciel Niryo One Studio possède une interface de codage par blocs de type Blockly , permettant d’utiliser et de programmer le robot sans connaître un langage de programmation.
Cette interface pourra également être utilisée pour mouvoir librement le robot et enregistrer ses positions afin de créer une séquence de mouvements.
Pour accéder à cette interface de programmation visuelle, cliquez sur le deuxième onglet du logiciel. Vous pouvez dès lors cliquer-déposer les différents blocs (logiques, boucles, variables…) pour constituer votre programme, de la même façon que dans les logiciels Scratch et Blockly.
Les boutons vert et rouge permettent respectivement de lancer et d’interrompre le programme.
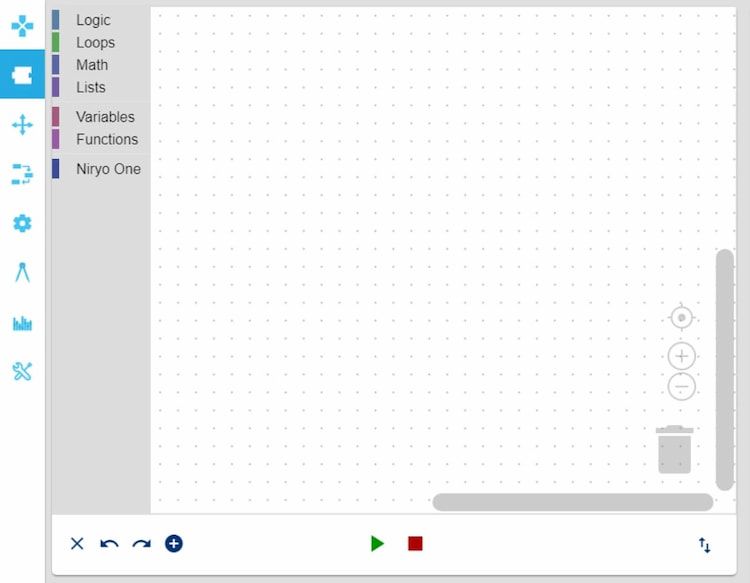
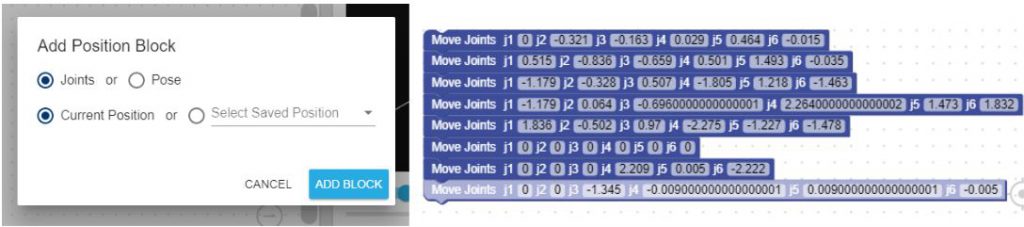
En utilisant le bouton + , puis ADD BLOCK , vous pouvez enregistrer la position actuelle du robot en tant que bloc d’instruction.
En utilisant cette commande plusieurs fois et en reliant les blocs entre eux, vous pouvez créer une suite de positions que le robot exécutera.
Connexion d’un ordinateur à plusieurs robots
Plutôt que de se connecter au réseau WiFi du robot, il est possible de connecter le robot à un autre réseau WiFi afin de pouvoir commander plusieurs robots depuis un unique ordinateur.
Pour cela, cliquez sur le quatrième onglet (roue crantée). Entrez le nom de votre WiFi et son mot de passe dans les champs prévus.
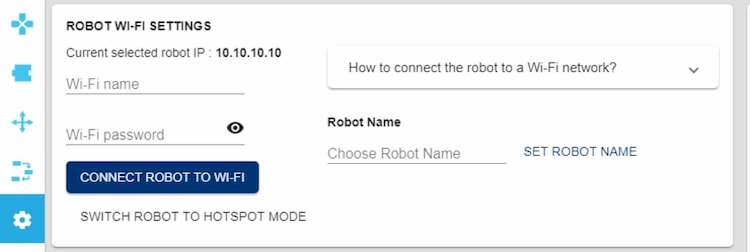
La LED de la base du bras est devenue verte : le robot s’est bien connecté au WiFi. Vous pouvez maintenant connecter votre ordinateur à votre WiFi.

Dans le logiciel Niryo One Studio, retournez dans le panneau de configuration du WiFi et recherchez votre robot sur votre réseau en cliquant sur le symbole de la loupe.
Une fois le robot trouvé, renseignez son IP et connectez-vous à lui.
Tour d’horizon des autres onglets
Le troisième onglet (croix directionnelle) permet de sauvegarder manuellement une position du bras pour pouvoir l’utiliser par la suite comme un bloc d’instruction.

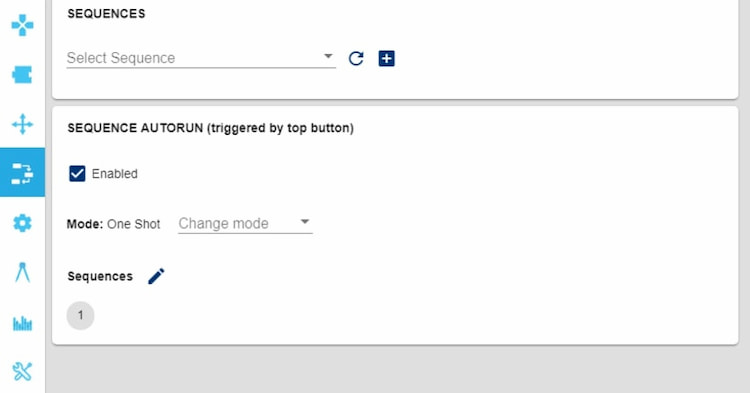
Le quatrième onglet permet de récupérer les programmes précédemment sauvegardés.
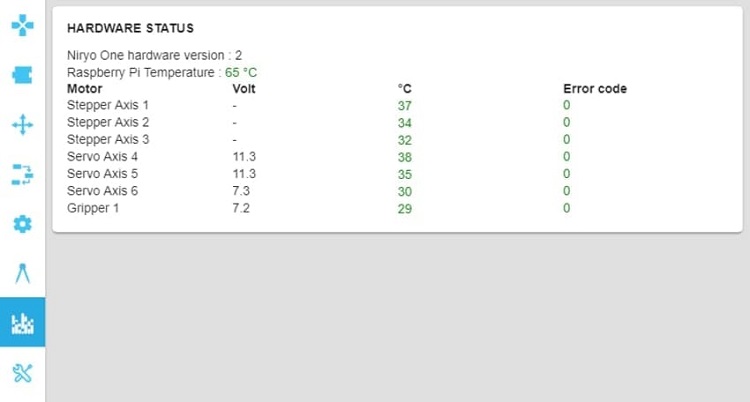
Les deux derniers onglets vous permettent d’avoir connaissance des états des moteurs et de la carte de contrôle, ainsi qu’une vue sur les logs du robot.
Extinction du robot Niryo One
Pour éteindre le robot, appuyez sur le bouton situé sur la base du robot jusqu’à que la LED devienne violette.

Relâchez le bouton et attendez que la LED passe rouge. Vous pouvez alors basculer l’interrupteur sur OFF, puis retirer le câble d’alimentation.
Présentation des autres outils Niryo
En plus de l’outil Gripper 1 utilisé dans ce guide, il existe actuellement quatre outils de la gamme Niryo One :
- Le Gripper 2 “Large”
- Le Gripper 3 “Adaptatif”
- L’ électroaimant
- La pompe à vide
Si les gripper 2 et 3 s’utilisent de la même manière que le Gripper 1, l’électroaimant et la pompe à vide présentent quelques particularités.
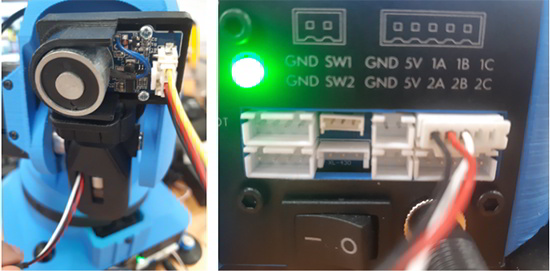
L’électroaimant permet d’ attraper des objets métalliques . A la différence des outils Gripper, il se connecte à la base du bras, sur l’un des deux connecteurs de droite. Lors du choix de l’outil sur le logiciel Niryo One Studio, il est nécessaire d’ indiquer sur quel connecteur le branchement a été effectué . Dans la photo ci-dessous, la connexion s’effectue sur le connecteur 1A (GPIO2).
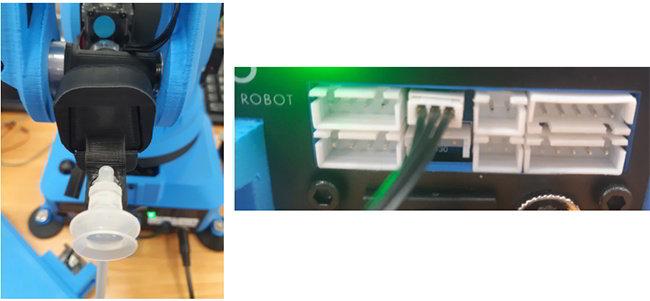
La pompe à vide permet d’attraper des objets avec une ventouse grâce à une aspiration d’air. Comme l’électroaimant, elle doit être connectée à la base du bras .
Cependant, il n’y a qu’un seul branchement possible, et il n’est donc pas nécessaire d’indiquer sur le logiciel sur quel connecteur elle a été branchée.
Ressources pour le bras Niryo One
Il existe de nombreuses ressources en ligne permettant de se familiariser avec le fonctionnement du bras Niryo One :
- Le guide de l’utilisateur , très complet
- Les fichiers STL des pièces de structure
- La documentation de l’API Python pour le bras robotique Niryo One