
Un kit R&D ROS créé par le GR Lab conçu spécifiquement pour les robots mobiles de chez AgileX Robotics.
Le bureau d’études en ingénierie de Génération Robots (GR Lab) a développé un kit de recherche et développement ROS, adaptable sur les robots mobiles AgileX Robotics, et intégrant tout le matériel nécessaire au développement de programmes robotiques.
Ce kit offre une solution robotique ready to develop, créé pour économiser du temps de montage.
- Mécanique : intégration des composants à la base mobile
- Electrique : branchement de tous les équipements entre eux
- Logiciel : installation des “packages” ROS des composants
Les composants utilisés par GR Lab sont :
- Un PC puissant dimensionné pour faire du développement d'algorithmes avancés
- Une IMU (centrale à inertie)
- Une caméra de profondeur
- Un LiDAR 3D
- Un GPS compatible RTK (Real Time Kinematic)
- Un Modem 4G (ou 5G en option)
Les composants peuvent être modulés selon les préférences ou besoins du client.
Maîtrise du Logiciel : Installation de l'OS, ROS, et VNC
En plus de l’intégration électronique et mécanique, nos ingénieurs ont géré la partie logicielle en installant l’OS sur les PC via Linux Ubuntu. Cette procédure comprend l’intégration de ROS (Robot Operating System) et des divers packages des composants essentiels au bon fonctionnement.
En parallèle de ROS, nous déployons également un outil indispensable, le VNC (Virtual Network Computing), qui offre via une page dédiée la possibilité de se connecter au bureau de l’ordinateur embarqué. Cela permet de connaître l’état de l’ordinateur à tout moment, mais aussi d’avoir le retour des informations remontées par les capteurs intégrés dans le kit.
Notre objectif : dès la réception du robot mobile équipé de son kit R&D ROS, nos clients peuvent immédiatement commencer à élaborer leur programme et travailler sur leur application. Le kit R&D élimine la nécessité de devoir développer un système d’information avant toute chose.
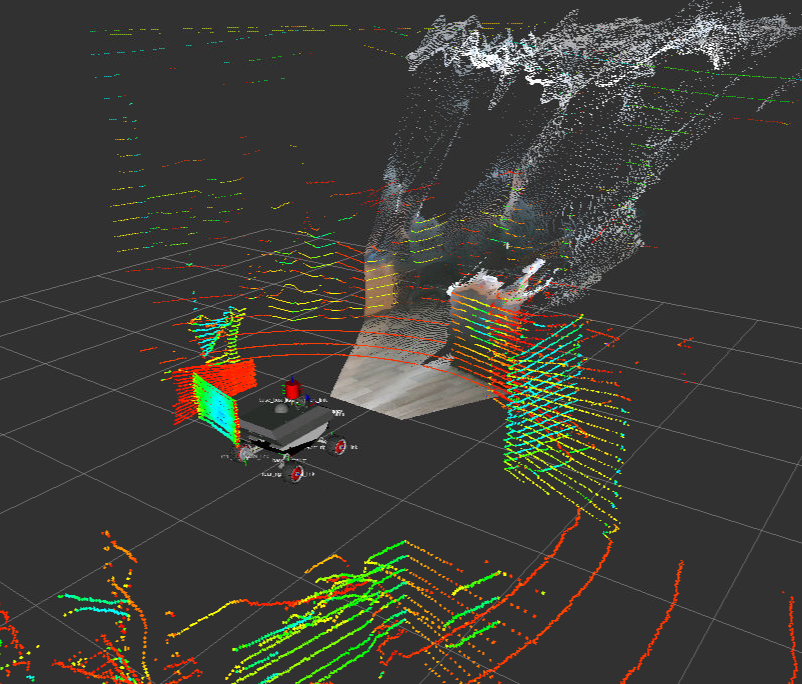
Une vue montrant le retour des datas des capteurs avec le modèle 3D (URDF) du robot au milieu.
Vue disponible sur ROS via le package développé par le GR Lab.
Exemple concret : Le Laboratoire de Recherche de Fraunhofer
Le GR Lab a développé un package ROS sur mesure pour l’université de Fraunhofer, basée en Allemagne. Pour ce projet, l’université a choisi les robots mobiles SCOUT MINI et HUNTER 2.0, sur lesquels nous avons monté un kit R&D ROS customisés pour les besoins du client (ajout de capteurs spécifiques). L’université prévoit d’utiliser ces robots mobiles, et les kits R&D, dans des projets étudiants sur le développement d’algorithmes de navigation.
Le GR Lab a sélectionné les composants suivant pour répondre au mieux aux besoin des clients :
- Un PC puissant dimensionné pour faire du développement d'algorithmes avancés
- Une IMU (centrale à inertie)
- La caméra de profondeur Realsense D435
- Le LiDAR 3D Helios 16P
- Un GPS compatible RTK (Real Time Kinematic)
- Un Modem 4G (ou 5G en option)
