
Afin de rendre le robot Baxter encore plus collaboratif qu’il ne l’est déjà, nos équipes du GR Lab ont décidé d’équiper le robot du plus célèbre des capteurs de profondeur: la caméra Kinect. Il n’y a rien de plus naturel pour un robot collaboratif que de directement interagir avec un utilisateur s’il le détecte dans son environnement d’où cette idée de lui ajouter un accessoire motorisé.


Pourquoi une caméra Kinect, pourquoi sur la tête du robot Baxter?
Grâce à la Kinect et au package the ROS Openni tracker package ( http://wiki.ros.org/openni_tracker ) les utilisateurs potentiels sont détectés dans l’environnement. La question de l’endroit et la manière de fixer la caméra Kinect s’est donc posée. Le critère principal concernant la position de la caméra est simplement l’angle de vue de celle-ci. Il fallait qu’elle soit capable d’observer son environnement sans être gênée par les mouvements du robot Baxter.
Le meilleur endroit possible pour installer la caméra Kinect était donc la tête. Un casque remplaçant celui du robot collaboratif Baxter a donc été conçu puis imprimé en 3D. Ce casque est compatible à la fois avec la caméra Kinect de Microsoft v1 mais aussi avec la caméra Kinect pour Windows 8 (V2).

Réflexion sur la manière de contrôler l’angle d’inclinaison de la caméra Kinect.
Afin de rendre l’interaction entre l’humain et le robot plus efficace, nos équipes d’ingénieurs ont décidé de contrôler l’angle d’inclinaison du capteur Kinect. L’objectif étant qu’une fois
que Baxter a détecté un utilisateur potentiel, la caméra doit suivre cet utilisateur et ne plus le perdre, afin de rendre l’interaction homme-robot la plus fonctionnelle possible.
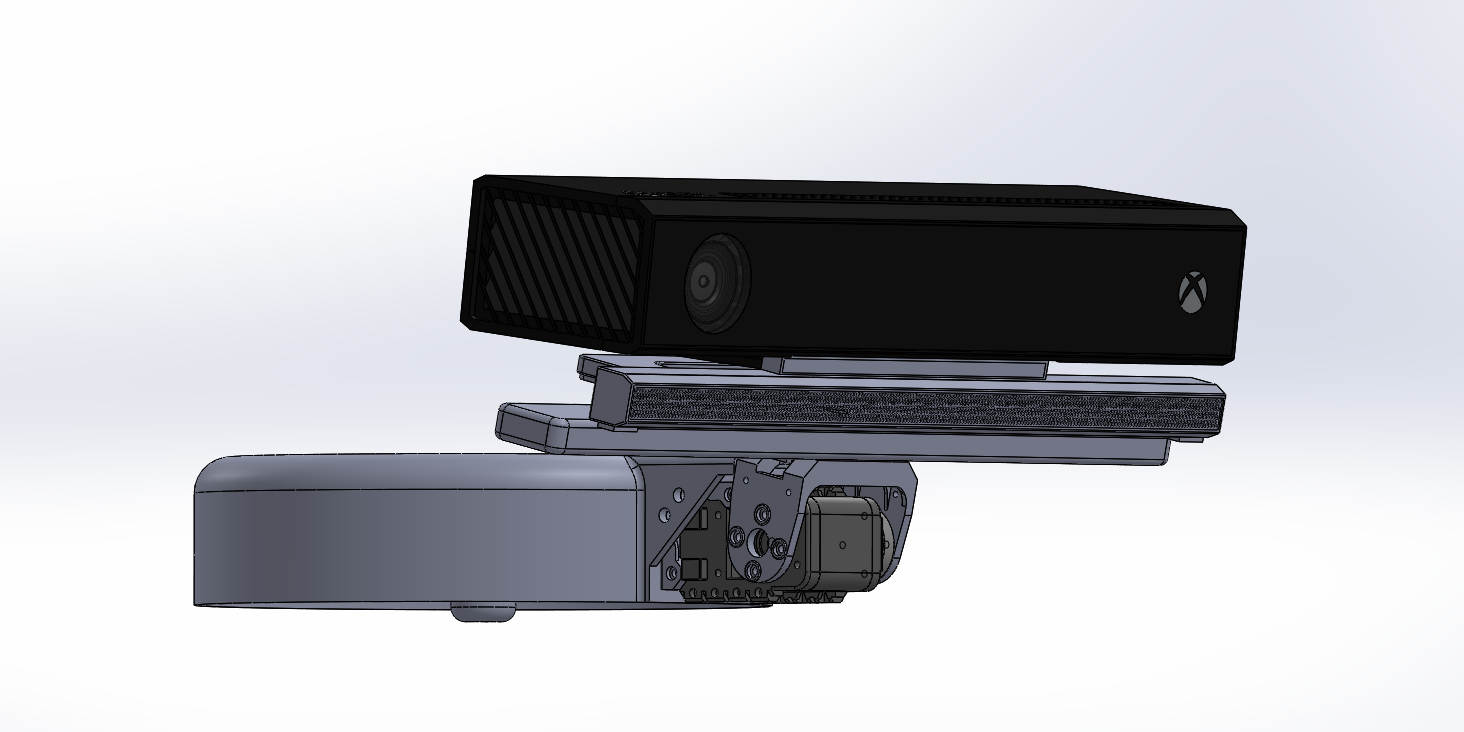
Le contrôle de l’inclinaison du capteur Kinect s’est fait grâce à un servomoteur dynamixel AX-18A dont l’emplacement a été prévu sur le nouveau « casque » de Baxter. Notre librairie Dynamixel python et compatible ROS a été ici utilisée afin d’ajuster l’inclinaison de la Kinect à la taille de l’utilisateur.
Les fichiers STL sont disponibles en téléchargement si vous souhaitez essayer de l’imprimer vous-mêmes en 3D:
S’il vous manque une imprimante 3D, ou d’autres éléments, tout ce qu’il vous faut est disponible sur notre site pour vous permettre de construire votre propre “casque” pour le robot Baxter !